 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time High-Quality Stereo Matching System on a GPU
Dec 01, 2022In this paper, we propose a low error rate and real-time stereo vision system on GPU. Many stereo vision systems on GPU have been proposed to date. In those systems, the error rates and the processing speed are in trade-off relationship. We propose a real-time stereo vision system on GPU for the high resolution images. This system also maintains a low error rate compared to other fast systems. In our approach, we have implemented the cost aggregation (CA), cross-checking and median filter on GPU in order to realize the real-time processing. Its processing speed is 40 fps for 1436x992 pixels images when the maximum disparity is 145, and its error rate is the lowest among the GPU systems which are faster than 30 fps.
Efficient stereo matching on embedded GPUs with zero-means cross correlation
Dec 01, 2022


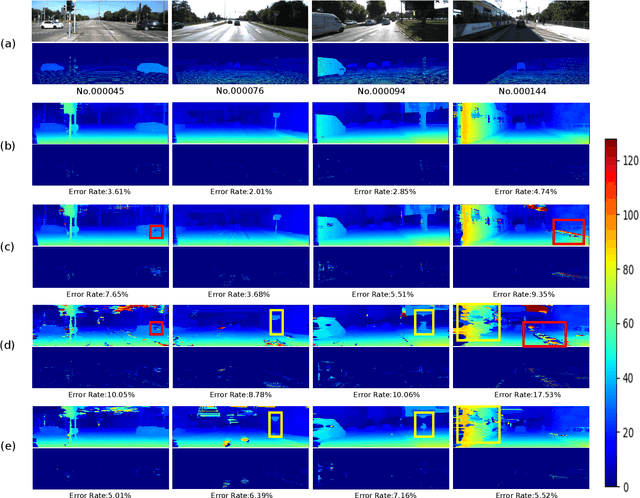
Mobile stereo-matching systems have become an important part of many applications, such as automated-driving vehicles and autonomous robots. Accurate stereo-matching methods usually lead to high computational complexity; however, mobile platforms have only limited hardware resources to keep their power consumption low; this makes it difficult to maintain both an acceptable processing speed and accuracy on mobile platforms. To resolve this trade-off, we herein propose a novel acceleration approach for the well-known zero-means normalized cross correlation (ZNCC) matching cost calculation algorithm on a Jetson Tx2 embedded GPU. In our method for accelerating ZNCC, target images are scanned in a zigzag fashion to efficiently reuse one pixel's computation for its neighboring pixels; this reduces the amount of data transmission and increases the utilization of on-chip registers, thus increasing the processing speed. As a result, our method is 2X faster than the traditional image scanning method, and 26% faster than the latest NCC method. By combining this technique with the domain transformation (DT) algorithm, our system show real-time processing speed of 32 fps, on a Jetson Tx2 GPU for 1,280x384 pixel images with a maximum disparity of 128. Additionally, the evaluation results on the KITTI 2015 benchmark show that our combined system is more accurate than the same algorithm combined with census by 7.26%, while maintaining almost the same processing speed.