 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV2X-AHD:Vehicle-to-Everything Cooperation Perception via Asymmetric Heterogenous Distillation Network
Oct 10, 2023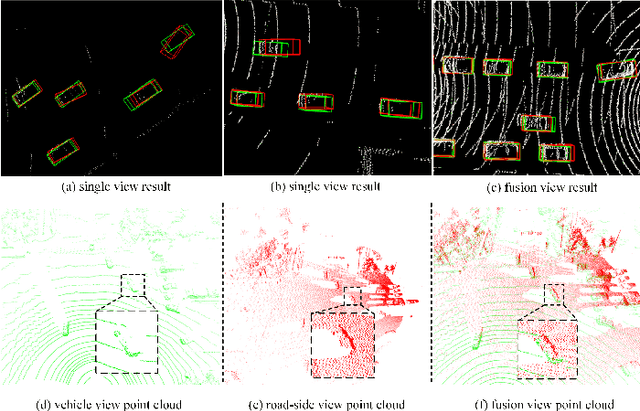



Object detection is the central issue of intelligent traffic systems, and recent advancements in single-vehicle lidar-based 3D detection indicate that it can provide accurate position information for intelligent agents to make decisions and plan. Compared with single-vehicle perception, multi-view vehicle-road cooperation perception has fundamental advantages, such as the elimination of blind spots and a broader range of perception, and has become a research hotspot. However, the current perception of cooperation focuses on improving the complexity of fusion while ignoring the fundamental problems caused by the absence of single-view outlines. We propose a multi-view vehicle-road cooperation perception system, vehicle-to-everything cooperative perception (V2X-AHD), in order to enhance the identification capability, particularly for predicting the vehicle's shape. At first, we propose an asymmetric heterogeneous distillation network fed with different training data to improve the accuracy of contour recognition, with multi-view teacher features transferring to single-view student features. While the point cloud data are sparse, we propose Spara Pillar, a spare convolutional-based plug-in feature extraction backbone, to reduce the number of parameters and improve and enhance feature extraction capabilities. Moreover, we leverage the multi-head self-attention (MSA) to fuse the single-view feature, and the lightweight design makes the fusion feature a smooth expression. The results of applying our algorithm to the massive open dataset V2Xset demonstrate that our method achieves the state-of-the-art result. The V2X-AHD can effectively improve the accuracy of 3D object detection and reduce the number of network parameters, according to this study, which serves as a benchmark for cooperative perception. The code for this article is available at https://github.com/feeling0414-lab/V2X-AHD.
Recognize Anything: A Strong Image Tagging Model
Jun 09, 2023



We present the Recognize Anything Model (RAM): a strong foundation model for image tagging. RAM makes a substantial step for large models in computer vision, demonstrating the zero-shot ability to recognize any common category with high accuracy. RAM introduces a new paradigm for image tagging, leveraging large-scale image-text pairs for training instead of manual annotations. The development of RAM comprises four key steps. Firstly, annotation-free image tags are obtained at scale through automatic text semantic parsing. Subsequently, a preliminary model is trained for automatic annotation by unifying the caption and tagging tasks, supervised by the original texts and parsed tags, respectively. Thirdly, a data engine is employed to generate additional annotations and clean incorrect ones. Lastly, the model is retrained with the processed data and fine-tuned using a smaller but higher-quality dataset. We evaluate the tagging capabilities of RAM on numerous benchmarks and observe impressive zero-shot performance, significantly outperforming CLIP and BLIP. Remarkably, RAM even surpasses the fully supervised manners and exhibits competitive performance with the Google tagging API. We are releasing the RAM at \url{https://recognize-anything.github.io/} to foster the advancements of large models in computer vision.