 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloping Vision-Language-Action Model from Egocentric Videos
Sep 26, 2025Egocentric videos capture how humans manipulate objects and tools, providing diverse motion cues for learning object manipulation. Unlike the costly, expert-driven manual teleoperation commonly used in training Vision-Language-Action models (VLAs), egocentric videos offer a scalable alternative. However, prior studies that leverage such videos for training robot policies typically rely on auxiliary annotations, such as detailed hand-pose recordings. Consequently, it remains unclear whether VLAs can be trained directly from raw egocentric videos. In this work, we address this challenge by leveraging EgoScaler, a framework that extracts 6DoF object manipulation trajectories from egocentric videos without requiring auxiliary recordings. We apply EgoScaler to four large-scale egocentric video datasets and automatically refine noisy or incomplete trajectories, thereby constructing a new large-scale dataset for VLA pre-training. Our experiments with a state-of-the-art $\pi_0$ architecture in both simulated and real-robot environments yield three key findings: (i) pre-training on our dataset improves task success rates by over 20\% compared to training from scratch, (ii) the performance is competitive with that achieved using real-robot datasets, and (iii) combining our dataset with real-robot data yields further improvements. These results demonstrate that egocentric videos constitute a promising and scalable resource for advancing VLA research.
EgoOops: A Dataset for Mistake Action Detection from Egocentric Videos with Procedural Texts
Oct 07, 2024
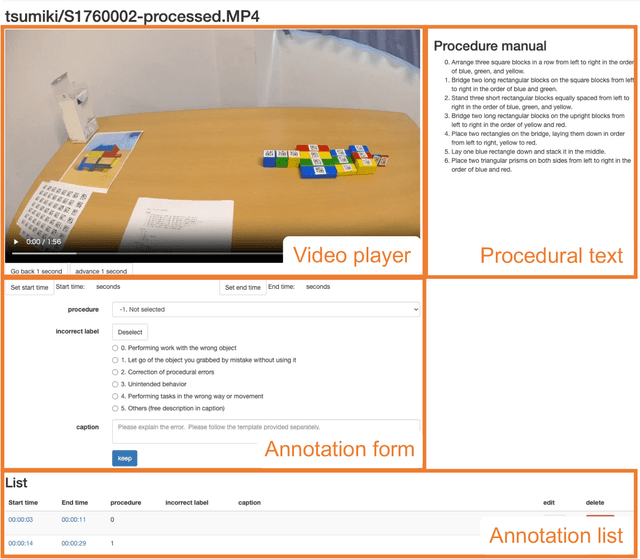

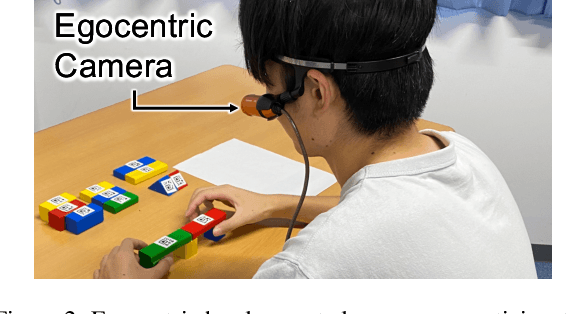
Mistake action detection from egocentric videos is crucial for developing intelligent archives that detect workers' errors and provide feedback. Previous studies have been limited to specific domains, focused on detecting mistakes from videos without procedural texts, and analyzed whether actions are mistakes. To address these limitations, in this paper, we propose the EgoOops dataset, which includes egocentric videos, procedural texts, and three types of annotations: video-text alignment, mistake labels, and descriptions for mistakes. EgoOops covers five procedural domains and includes 50 egocentric videos. The video-text alignment allows the model to detect mistakes based on both videos and procedural texts. The mistake labels and descriptions enable detailed analysis of real-world mistakes. Based on EgoOops, we tackle two tasks: video-text alignment and mistake detection. For video-text alignment, we enhance the recent StepFormer model with an additional loss for fine-tuning. Based on the alignment results, we propose a multi-modal classifier to predict mistake labels. In our experiments, the proposed methods achieve higher performance than the baselines. In addition, our ablation study demonstrates the effectiveness of combining videos and texts. We will release the dataset and codes upon publication.
Text-driven Affordance Learning from Egocentric Vision
Apr 03, 2024Visual affordance learning is a key component for robots to understand how to interact with objects. Conventional approaches in this field rely on pre-defined objects and actions, falling short of capturing diverse interactions in realworld scenarios. The key idea of our approach is employing textual instruction, targeting various affordances for a wide range of objects. This approach covers both hand-object and tool-object interactions. We introduce text-driven affordance learning, aiming to learn contact points and manipulation trajectories from an egocentric view following textual instruction. In our task, contact points are represented as heatmaps, and the manipulation trajectory as sequences of coordinates that incorporate both linear and rotational movements for various manipulations. However, when we gather data for this task, manual annotations of these diverse interactions are costly. To this end, we propose a pseudo dataset creation pipeline and build a large pseudo-training dataset: TextAFF80K, consisting of over 80K instances of the contact points, trajectories, images, and text tuples. We extend existing referring expression comprehension models for our task, and experimental results show that our approach robustly handles multiple affordances, serving as a new standard for affordance learning in real-world scenarios.