 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation-Driven Evolutionary Motion Parameterization for Contact-Rich Granular Scooping with a Soft Conical Robotic Hand
Apr 07, 2026Tool-based scooping is vital in robot-assisted tasks, enabling interaction with objects of varying sizes, shapes, and material states. Recent studies have shown that flexible, reconfigurable soft robotic end-effectors can adapt their shape to maintain consistent contact with container surfaces during scooping, improving efficiency compared to rigid tools. These soft tools can adjust to varying container sizes and materials without requiring complex sensing or control. However, the inherent compliance and complex deformation behavior of soft robotics introduce significant control complexity that limits practical applications. To address this challenge, this paper presents the development of a physics-based simulation model of a deformable soft conical robotic hand that captures its passive reconfiguration dynamics and enables systematic trajectory optimization for scooping tasks. We propose a novel physics-based simulation approach that accurately models the soft tool's morphing behavior from flat sheets to adaptive conical structures, combined with an evolutionary strategy framework that automatically optimizes scooping trajectories without manual parameter tuning. We validate the optimized trajectories through both simulation and real-robot experiments. The results demonstrate strong generalization and successfully address a range of challenging tasks previously beyond the reach of existing approaches. Videos of our experiments are available online: https://sites.google.com/view/scoopsh
A Soft Wrist with Anisotropic and Selectable Stiffness for Robust Robot Learning in Contact-rich Manipulation
Feb 16, 2026Contact-rich manipulation tasks in unstructured environments pose significant robustness challenges for robot learning, where unexpected collisions can cause damage and hinder policy acquisition. Existing soft end-effectors face fundamental limitations: they either provide a limited deformation range, lack directional stiffness control, or require complex actuation systems that compromise practicality. This study introduces CLAW (Compliant Leaf-spring Anisotropic soft Wrist), a novel soft wrist mechanism that addresses these limitations through a simple yet effective design using two orthogonal leaf springs and rotary joints with a locking mechanism. CLAW provides large 6-degree-of-freedom deformation (40mm lateral, 20mm vertical), anisotropic stiffness that is tunable across three distinct modes, while maintaining lightweight construction (330g) at low cost ($550). Experimental evaluations using imitation learning demonstrate that CLAW achieves 76% success rate in benchmark peg-insertion tasks, outperforming both the Fin Ray gripper (43%) and rigid gripper alternatives (36%). CLAW successfully handles diverse contact-rich scenarios, including precision assembly with tight tolerances and delicate object manipulation, demonstrating its potential to enable robust robot learning in contact-rich domains. Project page: https://project-page-manager.github.io/CLAW/
Stable In-hand Manipulation for a Lightweight Four-motor Prosthetic Hand
Jan 12, 2026Electric prosthetic hands should be lightweight to decrease the burden on the user, shaped like human hands for cosmetic purposes, and designed with motors enclosed inside to protect them from damage and dirt. Additionally, in-hand manipulation is necessary to perform daily activities such as transitioning between different postures, particularly through rotational movements, such as reorienting a pen into a writing posture after picking it up from a desk. We previously developed PLEXUS hand (Precision-Lateral dEXteroUS manipulation hand), a lightweight (311 g) prosthetic hand driven by four motors. This prosthetic performed reorientation between precision and lateral grasps with various objects. However, its controller required predefined object widths and was limited to handling lightweight objects (of weight up to 34 g). This study addresses these limitations by employing motor current feedback. Combined with the hand's previously optimized single-axis thumb, this approach achieves more stable manipulation by estimating the object's width and adjusting the index finger position to maintain stable object holding during the reorientation. Experimental validation using primitive objects of various widths (5-30 mm) and shapes (cylinders and prisms) resulted in a 100% success rate with lightweight objects and maintained a high success rate (>=80) even with heavy aluminum prisms (of weight up to 289 g). By contrast, the performance without index finger coordination dropped to just 40% on the heaviest 289 g prism. The hand also successfully executed several daily tasks, including closing bottle caps and orienting a pen for writing.
SCU-Hand: Soft Conical Universal Robotic Hand for Scooping Granular Media from Containers of Various Sizes
May 07, 2025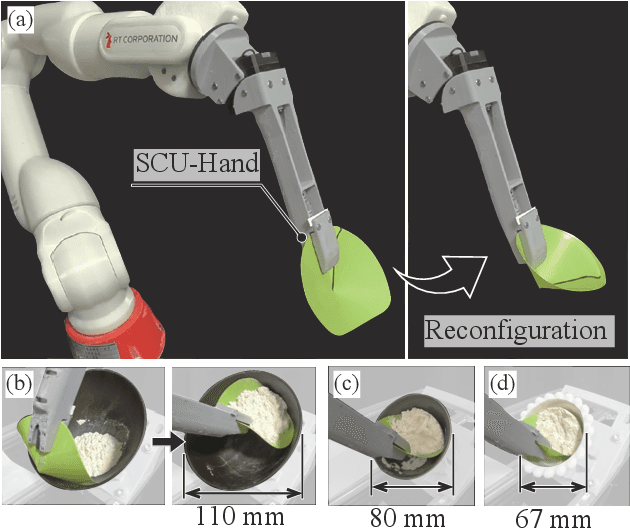
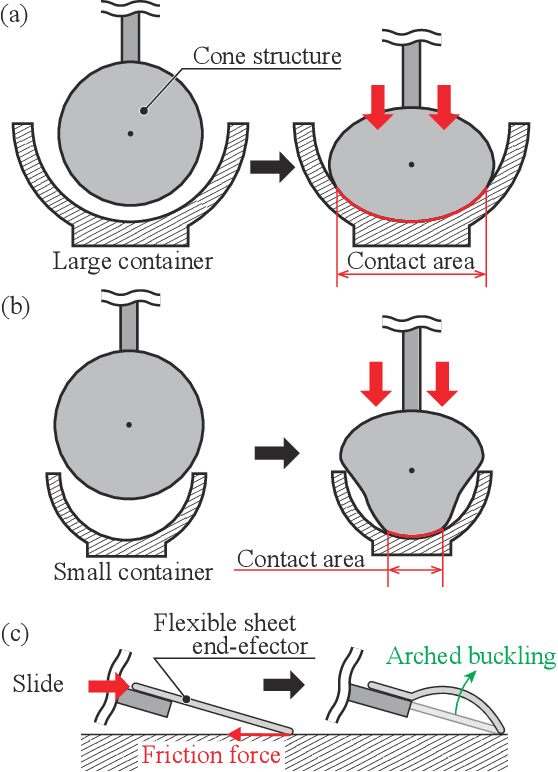
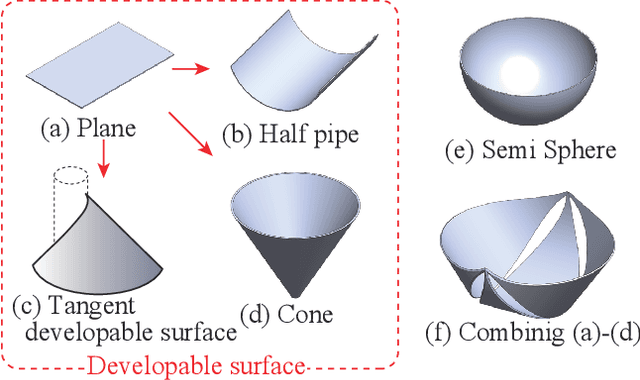
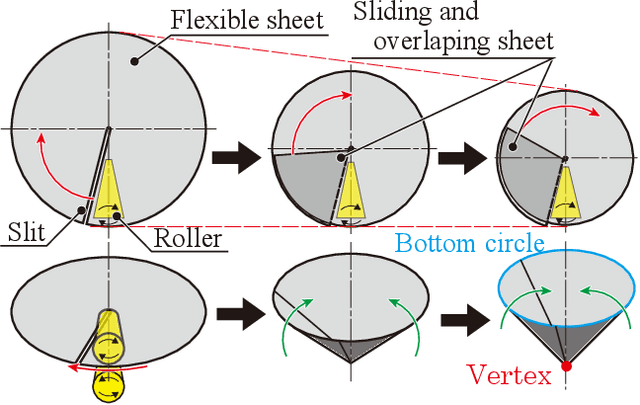
Automating small-scale experiments in materials science presents challenges due to the heterogeneous nature of experimental setups. This study introduces the SCU-Hand (Soft Conical Universal Robot Hand), a novel end-effector designed to automate the task of scooping powdered samples from various container sizes using a robotic arm. The SCU-Hand employs a flexible, conical structure that adapts to different container geometries through deformation, maintaining consistent contact without complex force sensing or machine learning-based control methods. Its reconfigurable mechanism allows for size adjustment, enabling efficient scooping from diverse container types. By combining soft robotics principles with a sheet-morphing design, our end-effector achieves high flexibility while retaining the necessary stiffness for effective powder manipulation. We detail the design principles, fabrication process, and experimental validation of the SCU-Hand. Experimental validation showed that the scooping capacity is about 20% higher than that of a commercial tool, with a scooping performance of more than 95% for containers of sizes between 67 mm to 110 mm. This research contributes to laboratory automation by offering a cost-effective, easily implementable solution for automating tasks such as materials synthesis and characterization processes.
Inflated Bendable Eversion Cantilever Mechanism with Inner Skeleton for Increased Payload Holding
Feb 09, 2022



Inflatable structures used in soft robotics applications exhibit unique characteristics. In particular, the tip-extension structure, which grows from the tip, can grow without friction against the environment. However, these inflatable structures are inferior to rigid mechanisms in terms of their load-bearing capacity. The stiffness of the tip-extension structure can be increased by pressurization, but the structure cannot maintain its curved shape and compliance. In this study, we proposed a mechanism that combines a skeleton structure consisting of multi-joint links with functions to increase rigidity while keeping low pressure and realizing the functions of bending and shape fixation. We devised a design method for rigid articulated links and combined it with a membrane structure that utilizes the advantages of the tip-extension structure. The experimental results show that the payload of the designed structure increases compared to that of the membrane-only structure. The findings of this research can be applied to long robots that can be extended in the air without drooping and to mechanisms that can wrap around the human body.
INPUT Team Description Paper in 2022
Feb 01, 2022INPUT is a team participating in the RoboCup Soccer Small League (SSL). It aims to show the world the technological capabilities of the Nagaoka region of Niigata Prefecture, which is where the team members are from. For this purpose, we are working on one of the projects from the Nagaoka Activation Zone of Energy (NAZE). Herein, we introduce two robots, v2019 and v2022, as well as AI systems that will be used in RoboCup 2022. In addition, we describe our efforts to develop robots in collaboration with companies in the Nagaoka area.
Retraction Mechanism of Soft Torus Robot with a Hydrostatic Skeleton
Mar 11, 2020



Soft robots have attracted much attention in recent years owing to their high adaptability. Long articulated soft robots enable diverse operations, and tip-extending robots that navigate their environment through growth are highly effective in robotic search applications. Because the robot membrane extends from the tip, these robots can lengthen without friction from the environment. However, the flexibility of the membrane inhibits tip retraction. Two methods have been proposed to resolve this issue; increasing the pressure of the internal fluid to reinforce rigidity, and mounting an actuator at the tip. The disadvantage of the former is that the increase is limited by the membrane pressure resistance, while the second method adds to the robot complexity. In this paper, we present a tip-retraction mechanism without bending motion that takes advantage of the friction from the external environment. Water is used as the internal fluid to increase ground pressure with the environment. We explore the failure pattern of the retraction motion and propose plausible solutions by using hydrostatic skeleton robot. Additionally, we develop a prototype robot that successfully retracts by using the proposed methodology. Our solution can contribute to the advancement of mechanical design in the soft robotics field with applications to soft snakes and manipulators.
Radial-Layer Jamming Mechanism for String Configuration
Dec 03, 2019



Grippers can be attached to objects in a rigid mode, and they are therefore used in various applications, for example granular jamming gripper. This paper introduces a cutting-edge radial layer jamming mechanism with is tunable stiffness, which is critical for the development of grippers. The layer jamming mechanism generates friction between the layers of multi cylindrical walls by pulling wire. This paper describes the principles of three types of proposed tendon-driven jamming mechanism, in addition to their prototypes of string configuration and the experiments conducted on the holding torques of their joints. Due to the string configuration, the surface and three-dimensional (3D) shape. This mechanism can be implemented in various applications.