 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVibrotactile Feedback for a Remote Operated Robot with Noise Subtraction Based on Perceived Intensity
Nov 07, 2024There is a growing demand for teleoperated robots. This paper presents a novel method for reducing vibration noise generated by robot's own motion, which can disrupt the quality of tactile feedback for teleoperated robots. Our approach focuses on perceived intensity, the amount of how humans experience vibration, to create a noise filter that aligns with human perceptual characteristics. This system effectively subtracts ego-noise while preserving the essential tactile signals, ensuring more accurate and reliable haptic feedback for operators. This method offers a refined solution to the challenge of maintaining high-quality tactile feedback in teleoperated systems.
Conveying Surroundings Information of a Robot End-Effector by Adjusting Controller Button Stiffness
Nov 07, 2024This study addresses the challenge of low dexterity in teleoperation tasks caused by limited sensory feedback and visual occlusion. We propose a novel approach that integrates haptic feedback into teleoperation using the adaptive triggers of a commercially available DualSense controller. By adjusting button stiffness based on the proximity of objects to the robot's end effector, the system provides intuitive, real-time feedback to the operator. To achieve this, the effective volume of the end effector is virtually expanded, allowing the system to predict interactions by calculating overlap with nearby objects. This predictive capability is independent of the user's intent or the robot's speed, enhancing the operator's situational awareness without requiring complex pre-programmed behaviors. The stiffness of the adaptive triggers is adjusted in proportion to this overlapping volume, effectively conveying spatial proximity and movement cues through an "one degree of freedom" haptic feedback mechanism. Compared to existing solutions, this method reduces hardware requirements and computational complexity by using a geometric simplification approach, enabling efficient operation with minimal processing demands. Simulation results demonstrate that the proposed system reduces collision risk and improves user performance, offering an intuitive, precise, and safe teleoperation experience despite real-world uncertainties and communication delays.
Retraction Mechanism of Soft Torus Robot with a Hydrostatic Skeleton
Mar 11, 2020



Soft robots have attracted much attention in recent years owing to their high adaptability. Long articulated soft robots enable diverse operations, and tip-extending robots that navigate their environment through growth are highly effective in robotic search applications. Because the robot membrane extends from the tip, these robots can lengthen without friction from the environment. However, the flexibility of the membrane inhibits tip retraction. Two methods have been proposed to resolve this issue; increasing the pressure of the internal fluid to reinforce rigidity, and mounting an actuator at the tip. The disadvantage of the former is that the increase is limited by the membrane pressure resistance, while the second method adds to the robot complexity. In this paper, we present a tip-retraction mechanism without bending motion that takes advantage of the friction from the external environment. Water is used as the internal fluid to increase ground pressure with the environment. We explore the failure pattern of the retraction motion and propose plausible solutions by using hydrostatic skeleton robot. Additionally, we develop a prototype robot that successfully retracts by using the proposed methodology. Our solution can contribute to the advancement of mechanical design in the soft robotics field with applications to soft snakes and manipulators.
Internally-Balanced Magnetic Mechanisms Using Magnetic Spring for Producing Large Amplified Clamping Force
Dec 03, 2019



To detach a permanent magnet with a controlled force much smaller than its original attractive force, the Internally-Balanced Magnetic Unit (IB Magnet) was invented and has been applied to magnetic devices such as wall-climbing robots, ceil-dangling drones, and modular swarm robots. In contrast to its drastic reduction rate on the control force, the IB Magnet has two major problems on its nonlinear spring which cancels out the internal force on the magnet: complicated design procedure and trade-off relationship between balancing precision and mechanism volume. This paper proposes a principle of a new balancing method for the IB Magnet which uses a like-pole pair of magnets as a magnetic spring, whose repulsive force ideally equals the attractive force of an unlike-pole pair exactly. To verify the proposed principle, the authors realized a prototype model of the IB Magnet using magnetic spring and verified through experiments its reduction rate is comparable to those of conventional IB Magnets. Moreover, the authors discussed and realized a robotic clamp as an application example containing proposed IB Magnets as its internal mechanism.
Radial-Layer Jamming Mechanism for String Configuration
Dec 03, 2019



Grippers can be attached to objects in a rigid mode, and they are therefore used in various applications, for example granular jamming gripper. This paper introduces a cutting-edge radial layer jamming mechanism with is tunable stiffness, which is critical for the development of grippers. The layer jamming mechanism generates friction between the layers of multi cylindrical walls by pulling wire. This paper describes the principles of three types of proposed tendon-driven jamming mechanism, in addition to their prototypes of string configuration and the experiments conducted on the holding torques of their joints. Due to the string configuration, the surface and three-dimensional (3D) shape. This mechanism can be implemented in various applications.
Floating Displacement-Force Conversion Mechanism as a Robotic Mechanism
Jul 22, 2019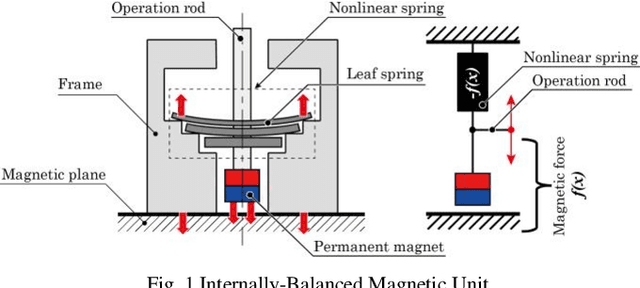
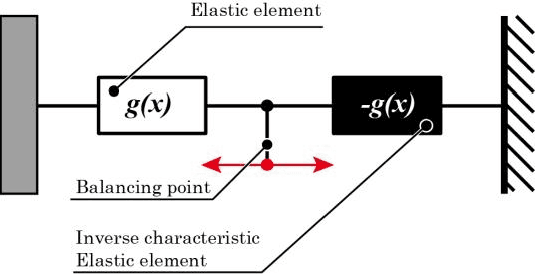
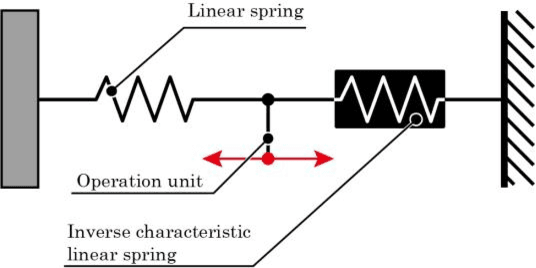
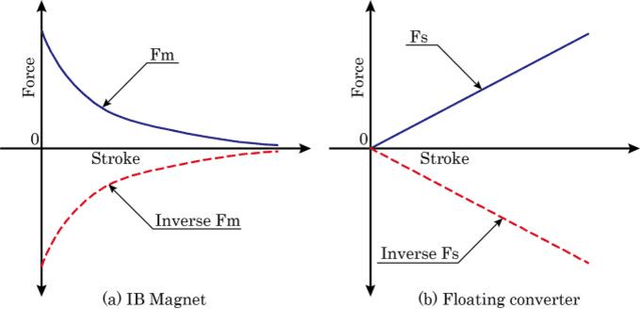
To attach and detach permanent magnets with an operation force smaller than their attractive force, Internally-Balanced Magnetic Unit (IB Magnet) has been developed. The unit utilizes a nonlinear spring with an inverse characteristic of magnetic attraction to produce a balancing force for canceling the internal force applied on the magnet. This paper extends the concept of shifting the equilibrium point of a system with a small operation force to linear systems such as conventional springs. Aligning a linear system and its inverse characteristic spring in series enables a mechanism to convert displacement into force generated by a spring with theoretically zero operation force. To verify the proposed principle, the authors realized a prototype model of inverse characteristic linear spring with an uncircular pulley. Experiments showed that the generating force of a linear spring can be controlled by a small and steady operation force.