 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInternally-Balanced Magnetic Mechanisms Using Magnetic Spring for Producing Large Amplified Clamping Force
Dec 03, 2019



To detach a permanent magnet with a controlled force much smaller than its original attractive force, the Internally-Balanced Magnetic Unit (IB Magnet) was invented and has been applied to magnetic devices such as wall-climbing robots, ceil-dangling drones, and modular swarm robots. In contrast to its drastic reduction rate on the control force, the IB Magnet has two major problems on its nonlinear spring which cancels out the internal force on the magnet: complicated design procedure and trade-off relationship between balancing precision and mechanism volume. This paper proposes a principle of a new balancing method for the IB Magnet which uses a like-pole pair of magnets as a magnetic spring, whose repulsive force ideally equals the attractive force of an unlike-pole pair exactly. To verify the proposed principle, the authors realized a prototype model of the IB Magnet using magnetic spring and verified through experiments its reduction rate is comparable to those of conventional IB Magnets. Moreover, the authors discussed and realized a robotic clamp as an application example containing proposed IB Magnets as its internal mechanism.
Fire Resistance Deformable Soft Gripper Based on Wire Jamming Mechanism
Dec 03, 2019



Able to grasp objects of any shape and size, universal grippers using variable stiffness phenomenon such as granular jamming have been developed for disaster robotics application. However, as their contact interface is mainly composed of unrigid and burnable silicone rubber, conventional soft grippers are not applicable to objects with sharp sections such as broken valves and glass fragments, especially on fire. In this research, the authors proposed a new method of variable stiffness mechanism using a string of beads that can be composed of cut-resistant and incombustible metals, arrange the mechanism to form a torus gripper, and conducted experiments to show its effectiveness.
Floating Displacement-Force Conversion Mechanism as a Robotic Mechanism
Jul 22, 2019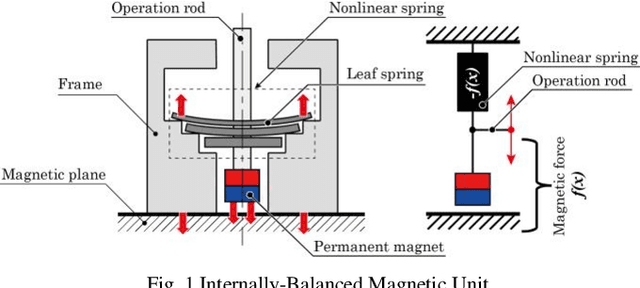
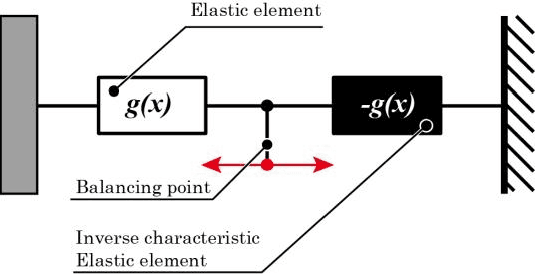
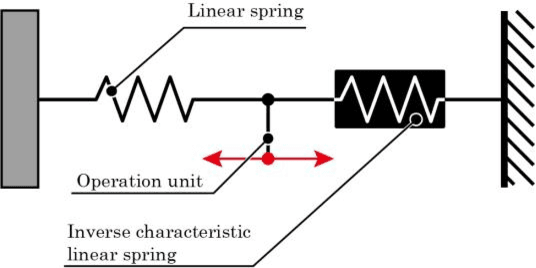
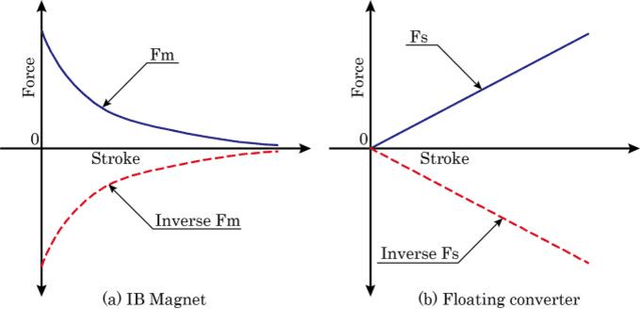
To attach and detach permanent magnets with an operation force smaller than their attractive force, Internally-Balanced Magnetic Unit (IB Magnet) has been developed. The unit utilizes a nonlinear spring with an inverse characteristic of magnetic attraction to produce a balancing force for canceling the internal force applied on the magnet. This paper extends the concept of shifting the equilibrium point of a system with a small operation force to linear systems such as conventional springs. Aligning a linear system and its inverse characteristic spring in series enables a mechanism to convert displacement into force generated by a spring with theoretically zero operation force. To verify the proposed principle, the authors realized a prototype model of inverse characteristic linear spring with an uncircular pulley. Experiments showed that the generating force of a linear spring can be controlled by a small and steady operation force.