 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePassive Luminescent Bellows Mechanism
Apr 05, 2025



The use of robots in disaster sites has rapidly expanded, with soft robots attracting particular interest due to their flexibility and adaptability. They can navigate through narrow spaces and debris, facilitating efficient and safe operations. However, low visibility in such environments remains a challenge. This study aims to enhance the visibility of soft robots by developing and evaluating a passive luminescent exible actuator activated by a black light. Using Ecoex mixed with phosphorescent powder, we fabricated an actuator and confirmed its fluorescence phosphorescence and deformation ability. Furthermore the effects of the mixing ratio on optical and mechanical properties were assessed.
Reflexive Input-Output Causality Mechanisms
Oct 14, 2024



This paper explores the concept of reflexive actuation, examining how robots may leverage both internal and external stimuli to trigger changes in the motion, performance, or physical characteristics of the robot, such as its size, shape, or configuration, and so on. These changes themselves may in turn be sequentially re-used as input to drive further adaptations. Drawing inspiration from biological systems, where reflexes are an essential component of the response to environmental changes, reflexive actuation is critical to enable robots to adapt to diverse situations and perform complex tasks. The underlying principles of reflexive actuation are analyzed, with examples provided from existing implementations such as contact-sensitive reflexive arms, physical counters, and their applications. The paper also outlines future directions and challenges for advancing this research area, emphasizing its significance in the development of adaptive, responsive robotic systems.
Digital Business Model Analysis Using a Large Language Model
Jun 09, 2024

Digital transformation (DX) has recently become a pressing issue for many companies as the latest digital technologies, such as artificial intelligence and the Internet of Things, can be easily utilized. However, devising new business models is not easy for compa-nies, though they can improve their operations through digital technologies. Thus, business model design support methods are needed by people who lack digital tech-nology expertise. In contrast, large language models (LLMs) represented by ChatGPT and natural language processing utilizing LLMs have been developed revolutionarily. A business model design support system that utilizes these technologies has great potential. However, research on this area is scant. Accordingly, this study proposes an LLM-based method for comparing and analyzing similar companies from different business do-mains as a first step toward business model design support utilizing LLMs. This method can support idea generation in digital business model design.
Inflated Bendable Eversion Cantilever Mechanism with Inner Skeleton for Increased Payload Holding
Feb 09, 2022



Inflatable structures used in soft robotics applications exhibit unique characteristics. In particular, the tip-extension structure, which grows from the tip, can grow without friction against the environment. However, these inflatable structures are inferior to rigid mechanisms in terms of their load-bearing capacity. The stiffness of the tip-extension structure can be increased by pressurization, but the structure cannot maintain its curved shape and compliance. In this study, we proposed a mechanism that combines a skeleton structure consisting of multi-joint links with functions to increase rigidity while keeping low pressure and realizing the functions of bending and shape fixation. We devised a design method for rigid articulated links and combined it with a membrane structure that utilizes the advantages of the tip-extension structure. The experimental results show that the payload of the designed structure increases compared to that of the membrane-only structure. The findings of this research can be applied to long robots that can be extended in the air without drooping and to mechanisms that can wrap around the human body.
Hundred Drones Land in a Minute
Mar 11, 2020



Currently, drone research and development has received significant attention worldwide. Particularly, delivery services employ drones as it is a viable method to improve delivery efficiency by using a several unmanned drones. Research has been conducted to realize complete automation of drone control for such services. However, regarding the takeoff and landing port of the drones, conventional methods have focused on the landing operation of a single drone, and the continuous landing of multiple drones has not been realized. To address this issue, we propose a completely novel port system, "EAGLES Port," that allows several drones to continuously land and takeoff in a short time. Experiments verified that the landing time efficiency of the proposed port is ideally 7.5 times higher than that of conventional vertical landing systems. Moreover, the system can tolerate 270 mm of horizontal positional error, +-30 deg of angular error in the drone's approach (+-40 deg with the proposed gate mechanism), and up to 1.9 m/s of drone's approach speed. This technology significantly contributes to the scalability of drone usage. Therefore, it is critical for the development of a future drone port for the landing of automated drone swarms.
Retraction Mechanism of Soft Torus Robot with a Hydrostatic Skeleton
Mar 11, 2020



Soft robots have attracted much attention in recent years owing to their high adaptability. Long articulated soft robots enable diverse operations, and tip-extending robots that navigate their environment through growth are highly effective in robotic search applications. Because the robot membrane extends from the tip, these robots can lengthen without friction from the environment. However, the flexibility of the membrane inhibits tip retraction. Two methods have been proposed to resolve this issue; increasing the pressure of the internal fluid to reinforce rigidity, and mounting an actuator at the tip. The disadvantage of the former is that the increase is limited by the membrane pressure resistance, while the second method adds to the robot complexity. In this paper, we present a tip-retraction mechanism without bending motion that takes advantage of the friction from the external environment. Water is used as the internal fluid to increase ground pressure with the environment. We explore the failure pattern of the retraction motion and propose plausible solutions by using hydrostatic skeleton robot. Additionally, we develop a prototype robot that successfully retracts by using the proposed methodology. Our solution can contribute to the advancement of mechanical design in the soft robotics field with applications to soft snakes and manipulators.
Internally-Balanced Magnetic Mechanisms Using Magnetic Spring for Producing Large Amplified Clamping Force
Dec 03, 2019



To detach a permanent magnet with a controlled force much smaller than its original attractive force, the Internally-Balanced Magnetic Unit (IB Magnet) was invented and has been applied to magnetic devices such as wall-climbing robots, ceil-dangling drones, and modular swarm robots. In contrast to its drastic reduction rate on the control force, the IB Magnet has two major problems on its nonlinear spring which cancels out the internal force on the magnet: complicated design procedure and trade-off relationship between balancing precision and mechanism volume. This paper proposes a principle of a new balancing method for the IB Magnet which uses a like-pole pair of magnets as a magnetic spring, whose repulsive force ideally equals the attractive force of an unlike-pole pair exactly. To verify the proposed principle, the authors realized a prototype model of the IB Magnet using magnetic spring and verified through experiments its reduction rate is comparable to those of conventional IB Magnets. Moreover, the authors discussed and realized a robotic clamp as an application example containing proposed IB Magnets as its internal mechanism.
Radial-Layer Jamming Mechanism for String Configuration
Dec 03, 2019



Grippers can be attached to objects in a rigid mode, and they are therefore used in various applications, for example granular jamming gripper. This paper introduces a cutting-edge radial layer jamming mechanism with is tunable stiffness, which is critical for the development of grippers. The layer jamming mechanism generates friction between the layers of multi cylindrical walls by pulling wire. This paper describes the principles of three types of proposed tendon-driven jamming mechanism, in addition to their prototypes of string configuration and the experiments conducted on the holding torques of their joints. Due to the string configuration, the surface and three-dimensional (3D) shape. This mechanism can be implemented in various applications.
Fire Resistance Deformable Soft Gripper Based on Wire Jamming Mechanism
Dec 03, 2019



Able to grasp objects of any shape and size, universal grippers using variable stiffness phenomenon such as granular jamming have been developed for disaster robotics application. However, as their contact interface is mainly composed of unrigid and burnable silicone rubber, conventional soft grippers are not applicable to objects with sharp sections such as broken valves and glass fragments, especially on fire. In this research, the authors proposed a new method of variable stiffness mechanism using a string of beads that can be composed of cut-resistant and incombustible metals, arrange the mechanism to form a torus gripper, and conducted experiments to show its effectiveness.
Floating Displacement-Force Conversion Mechanism as a Robotic Mechanism
Jul 22, 2019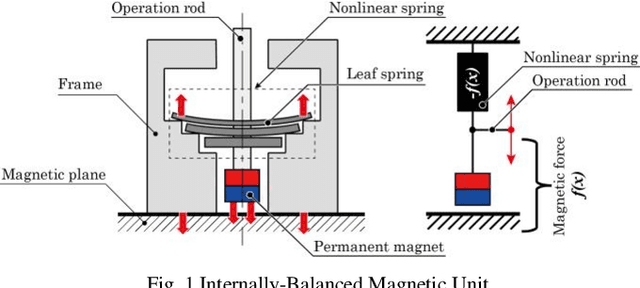
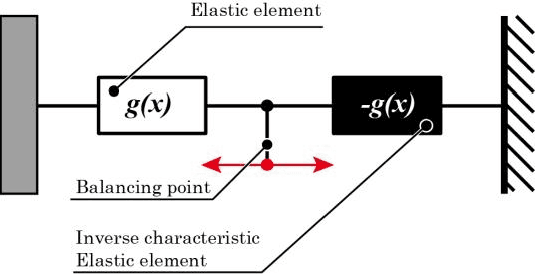
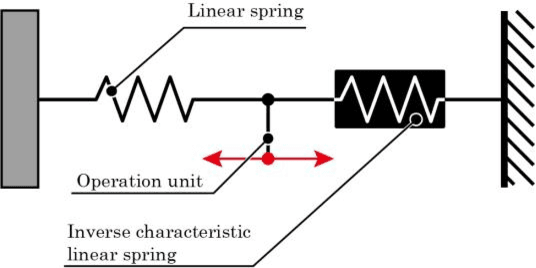
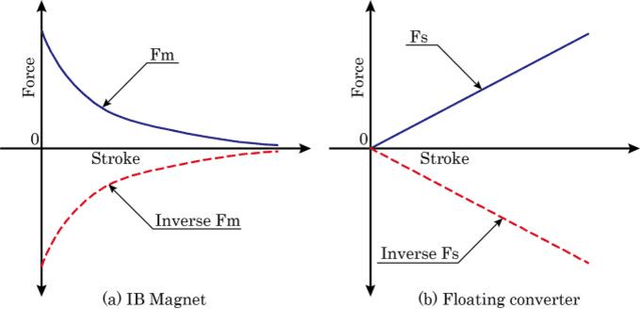
To attach and detach permanent magnets with an operation force smaller than their attractive force, Internally-Balanced Magnetic Unit (IB Magnet) has been developed. The unit utilizes a nonlinear spring with an inverse characteristic of magnetic attraction to produce a balancing force for canceling the internal force applied on the magnet. This paper extends the concept of shifting the equilibrium point of a system with a small operation force to linear systems such as conventional springs. Aligning a linear system and its inverse characteristic spring in series enables a mechanism to convert displacement into force generated by a spring with theoretically zero operation force. To verify the proposed principle, the authors realized a prototype model of inverse characteristic linear spring with an uncircular pulley. Experiments showed that the generating force of a linear spring can be controlled by a small and steady operation force.