 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOver-communicate no more: Situated RL agents learn concise communication protocols
Nov 02, 2022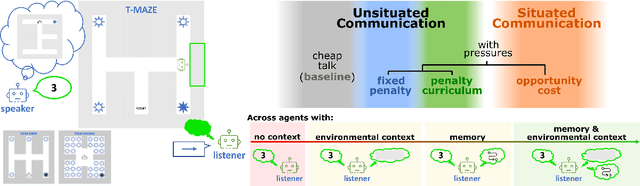
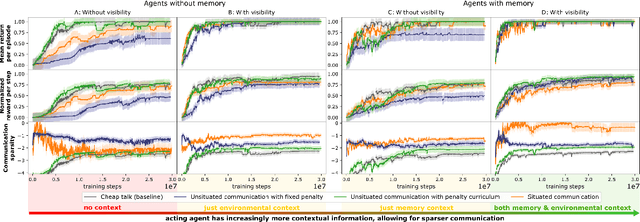
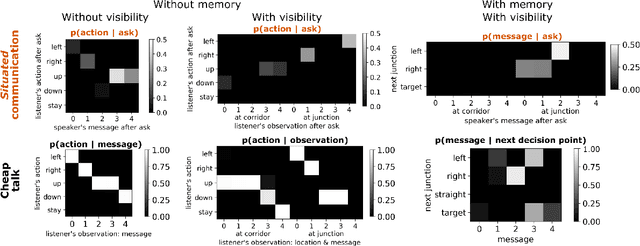
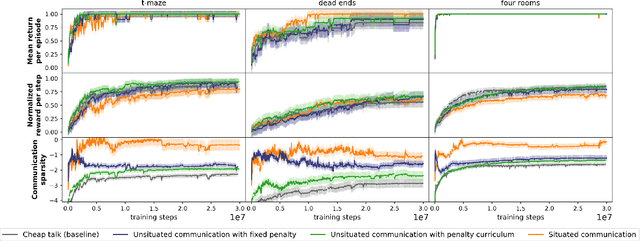
While it is known that communication facilitates cooperation in multi-agent settings, it is unclear how to design artificial agents that can learn to effectively and efficiently communicate with each other. Much research on communication emergence uses reinforcement learning (RL) and explores unsituated communication in one-step referential tasks -- the tasks are not temporally interactive and lack time pressures typically present in natural communication. In these settings, agents may successfully learn to communicate, but they do not learn to exchange information concisely -- they tend towards over-communication and an inefficient encoding. Here, we explore situated communication in a multi-step task, where the acting agent has to forgo an environmental action to communicate. Thus, we impose an opportunity cost on communication and mimic the real-world pressure of passing time. We compare communication emergence under this pressure against learning to communicate with a cost on articulation effort, implemented as a per-message penalty (fixed and progressively increasing). We find that while all tested pressures can disincentivise over-communication, situated communication does it most effectively and, unlike the cost on effort, does not negatively impact emergence. Implementing an opportunity cost on communication in a temporally extended environment is a step towards embodiment, and might be a pre-condition for incentivising efficient, human-like communication.
Online User Assessment for Minimal Intervention During Task-Based Robotic Assistance
Jun 06, 2018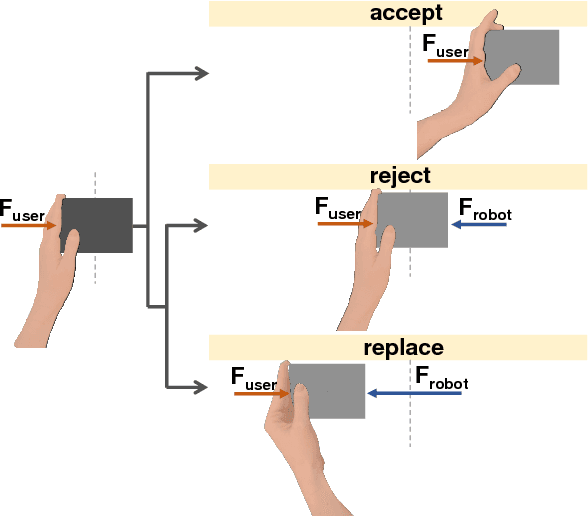
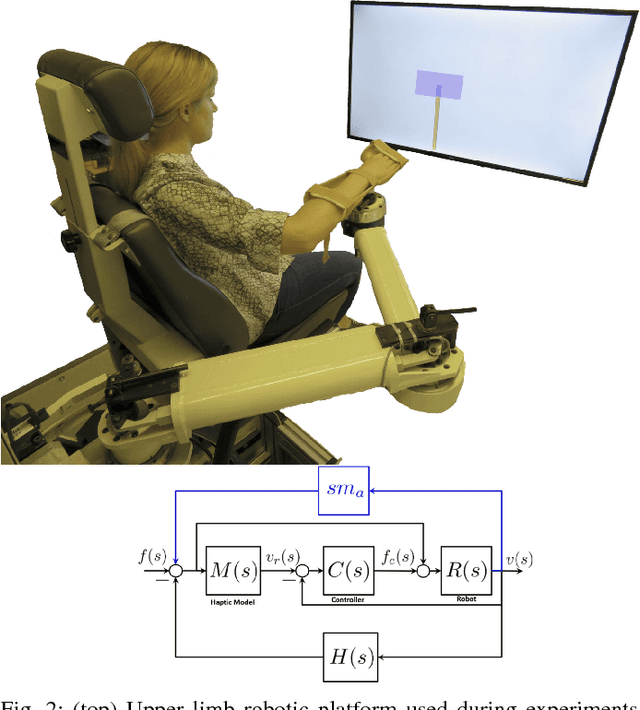
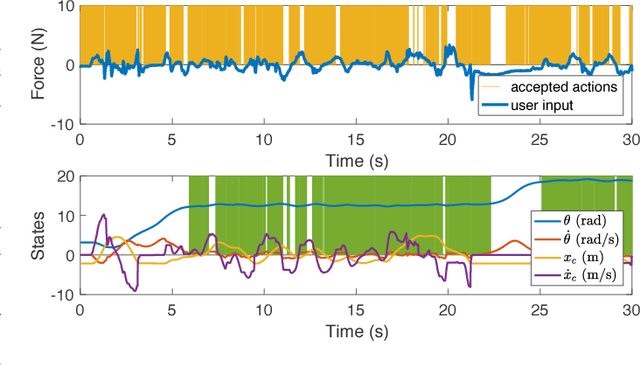
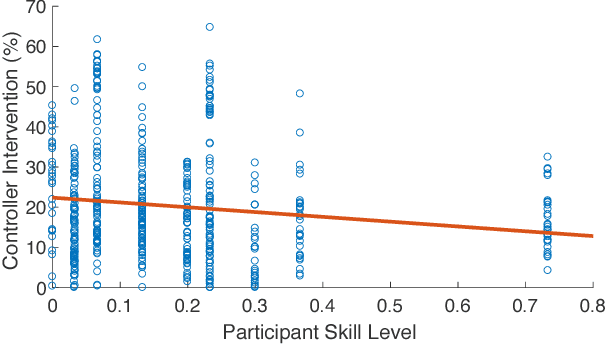
We propose a novel criterion for evaluating user input for human-robot interfaces for known tasks. We use the mode insertion gradient (MIG)---a tool from hybrid control theory---as a filtering criterion that instantaneously assesses the impact of user actions on a dynamic system over a time window into the future. As a result, the filter is permissive to many chosen strategies, minimally engaging, and skill-sensitive---qualities desired when evaluating human actions. Through a human study with 28 healthy volunteers, we show that the criterion exhibits a low, but significant, negative correlation between skill level, as estimated from task-specific measures in unassisted trials, and the rate of controller intervention during assistance. Moreover, a MIG-based filter can be utilized to create a shared control scheme for training or assistance. In the human study, we observe a substantial training effect when using a MIG-based filter to perform cart-pendulum inversion, particularly when comparing improvement via the RMS error measure. Using simulation of a controlled spring-loaded inverted pendulum (SLIP) as a test case, we observe that the MIG criterion could be used for assistance to guarantee either task completion or safety of a joint human-robot system, while maintaining the system's flexibility with respect to user-chosen strategies.
* 10 pages