 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking that Matters: Rethinking Benchmarking for Practical Impact
Nov 15, 2025Benchmarking has driven scientific progress in Evolutionary Computation, yet current practices fall short of real-world needs. Widely used synthetic suites such as BBOB and CEC isolate algorithmic phenomena but poorly reflect the structure, constraints, and information limitations of continuous and mixed-integer optimization problems in practice. This disconnect leads to the misuse of benchmarking suites for competitions, automated algorithm selection, and industrial decision-making, despite these suites being designed for different purposes. We identify key gaps in current benchmarking practices and tooling, including limited availability of real-world-inspired problems, missing high-level features, and challenges in multi-objective and noisy settings. We propose a vision centered on curated real-world-inspired benchmarks, practitioner-accessible feature spaces and community-maintained performance databases. Real progress requires coordinated effort: A living benchmarking ecosystem that evolves with real-world insights and supports both scientific understanding and industrial use.
Balancing Specialization and Centralization: A Multi-Agent Reinforcement Learning Benchmark for Sequential Industrial Control
Oct 23, 2025Autonomous control of multi-stage industrial processes requires both local specialization and global coordination. Reinforcement learning (RL) offers a promising approach, but its industrial adoption remains limited due to challenges such as reward design, modularity, and action space management. Many academic benchmarks differ markedly from industrial control problems, limiting their transferability to real-world applications. This study introduces an enhanced industry-inspired benchmark environment that combines tasks from two existing benchmarks, SortingEnv and ContainerGym, into a sequential recycling scenario with sorting and pressing operations. We evaluate two control strategies: a modular architecture with specialized agents and a monolithic agent governing the full system, while also analyzing the impact of action masking. Our experiments show that without action masking, agents struggle to learn effective policies, with the modular architecture performing better. When action masking is applied, both architectures improve substantially, and the performance gap narrows considerably. These results highlight the decisive role of action space constraints and suggest that the advantages of specialization diminish as action complexity is reduced. The proposed benchmark thus provides a valuable testbed for exploring practical and robust multi-agent RL solutions in industrial automation, while contributing to the ongoing debate on centralization versus specialization.
Cumulative Learning Rate Adaptation: Revisiting Path-Based Schedules for SGD and Adam
Aug 07, 2025The learning rate is a crucial hyperparameter in deep learning, with its ideal value depending on the problem and potentially changing during training. In this paper, we investigate the practical utility of adaptive learning rate mechanisms that adjust step sizes dynamically in response to the loss landscape. We revisit a cumulative path-based adaptation scheme proposed in 2017, which adjusts the learning rate based on the discrepancy between the observed path length, computed as a time-discounted sum of normalized gradient steps, and the expected length of a random walk. While the original approach offers a compelling intuition, we show that its adaptation mechanism for Adam is conceptually inconsistent due to the optimizer's internal preconditioning. We propose a corrected variant that better reflects Adam's update dynamics. To assess the practical value of online learning rate adaptation, we benchmark SGD and Adam, with and without cumulative adaptation, and compare them to a recent alternative method. Our results aim to clarify when and why such adaptive strategies offer practical benefits.
A Superlinearly Convergent Evolution Strategy
May 16, 2025We present a hybrid algorithm between an evolution strategy and a quasi Newton method. The design is based on the Hessian Estimation Evolution Strategy, which iteratively estimates the inverse square root of the Hessian matrix of the problem. This is akin to a quasi-Newton method and corresponding derivative-free trust-region algorithms like NEWUOA. The proposed method therefore replaces the global recombination step commonly found in non-elitist evolution strategies with a quasi-Newton step. Numerical results show superlinear convergence, resulting in improved performance in particular on smooth convex problems.
Deep Reinforcement Learning Based Navigation with Macro Actions and Topological Maps
Apr 25, 2025This paper addresses the challenge of navigation in large, visually complex environments with sparse rewards. We propose a method that uses object-oriented macro actions grounded in a topological map, allowing a simple Deep Q-Network (DQN) to learn effective navigation policies. The agent builds a map by detecting objects from RGBD input and selecting discrete macro actions that correspond to navigating to these objects. This abstraction drastically reduces the complexity of the underlying reinforcement learning problem and enables generalization to unseen environments. We evaluate our approach in a photorealistic 3D simulation and show that it significantly outperforms a random baseline under both immediate and terminal reward conditions. Our results demonstrate that topological structure and macro-level abstraction can enable sample-efficient learning even from pixel data.
Curriculum RL meets Monte Carlo Planning: Optimization of a Real World Container Management Problem
Mar 21, 2025In this work, we augment reinforcement learning with an inference-time collision model to ensure safe and efficient container management in a waste-sorting facility with limited processing capacity. Each container has two optimal emptying volumes that trade off higher throughput against overflow risk. Conventional reinforcement learning (RL) approaches struggle under delayed rewards, sparse critical events, and high-dimensional uncertainty -- failing to consistently balance higher-volume empties with the risk of safety-limit violations. To address these challenges, we propose a hybrid method comprising: (1) a curriculum-learning pipeline that incrementally trains a PPO agent to handle delayed rewards and class imbalance, and (2) an offline pairwise collision model used at inference time to proactively avert collisions with minimal online cost. Experimental results show that our targeted inference-time collision checks significantly improve collision avoidance, reduce safety-limit violations, maintain high throughput, and scale effectively across varying container-to-PU ratios. These findings offer actionable guidelines for designing safe and efficient container-management systems in real-world facilities.
SortingEnv: An Extendable RL-Environment for an Industrial Sorting Process
Mar 13, 2025We present a novel reinforcement learning (RL) environment designed to both optimize industrial sorting systems and study agent behavior in evolving spaces. In simulating material flow within a sorting process our environment follows the idea of a digital twin, with operational parameters like belt speed and occupancy level. To reflect real-world challenges, we integrate common upgrades to industrial setups, like new sensors or advanced machinery. It thus includes two variants: a basic version focusing on discrete belt speed adjustments and an advanced version introducing multiple sorting modes and enhanced material composition observations. We detail the observation spaces, state update mechanisms, and reward functions for both environments. We further evaluate the efficiency of common RL algorithms like Proximal Policy Optimization (PPO), Deep-Q-Networks (DQN), and Advantage Actor Critic (A2C) in comparison to a classical rule-based agent (RBA). This framework not only aids in optimizing industrial processes but also provides a foundation for studying agent behavior and transferability in evolving environments, offering insights into model performance and practical implications for real-world RL applications.
Variable Metric Evolution Strategies for High-dimensional Multi-Objective Optimization
Dec 20, 2024We design a class of variable metric evolution strategies well suited for high-dimensional problems. We target problems with many variables, not (necessarily) with many objectives. The construction combines two independent developments: efficient algorithms for scaling covariance matrix adaptation to high dimensions, and evolution strategies for multi-objective optimization. In order to design a specific instance of the class we first develop a (1+1) version of the limited memory matrix adaptation evolution strategy and then use an established standard construction to turn a population thereof into a state-of-the-art multi-objective optimizer with indicator-based selection. The method compares favorably to adaptation of the full covariance matrix.
Solving a Real-World Optimization Problem Using Proximal Policy Optimization with Curriculum Learning and Reward Engineering
Apr 03, 2024



We present a proximal policy optimization (PPO) agent trained through curriculum learning (CL) principles and meticulous reward engineering to optimize a real-world high-throughput waste sorting facility. Our work addresses the challenge of effectively balancing the competing objectives of operational safety, volume optimization, and minimizing resource usage. A vanilla agent trained from scratch on these multiple criteria fails to solve the problem due to its inherent complexities. This problem is particularly difficult due to the environment's extremely delayed rewards with long time horizons and class (or action) imbalance, with important actions being infrequent in the optimal policy. This forces the agent to anticipate long-term action consequences and prioritize rare but rewarding behaviours, creating a non-trivial reinforcement learning task. Our five-stage CL approach tackles these challenges by gradually increasing the complexity of the environmental dynamics during policy transfer while simultaneously refining the reward mechanism. This iterative and adaptable process enables the agent to learn a desired optimal policy. Results demonstrate that our approach significantly improves inference-time safety, achieving near-zero safety violations in addition to enhancing waste sorting plant efficiency.
ProtoP-OD: Explainable Object Detection with Prototypical Parts
Feb 29, 2024
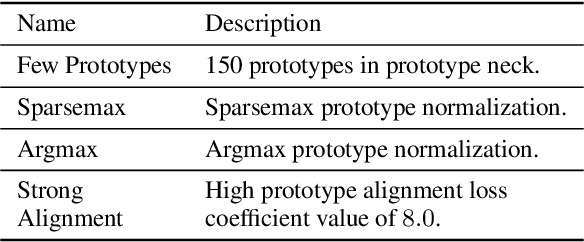
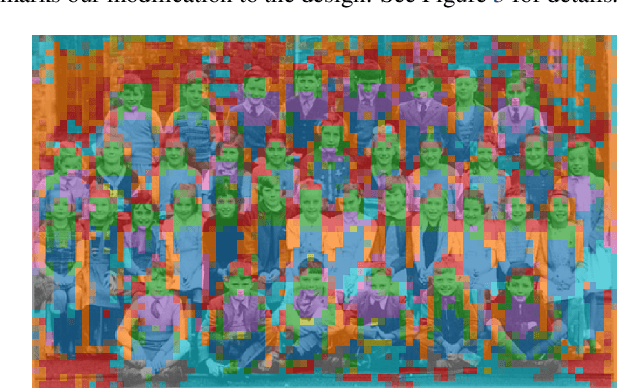
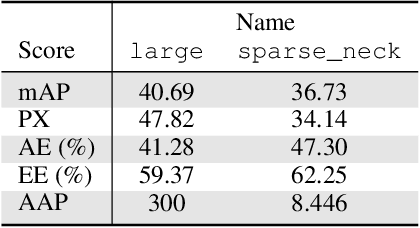
Interpretation and visualization of the behavior of detection transformers tends to highlight the locations in the image that the model attends to, but it provides limited insight into the \emph{semantics} that the model is focusing on. This paper introduces an extension to detection transformers that constructs prototypical local features and uses them in object detection. These custom features, which we call prototypical parts, are designed to be mutually exclusive and align with the classifications of the model. The proposed extension consists of a bottleneck module, the prototype neck, that computes a discretized representation of prototype activations and a new loss term that matches prototypes to object classes. This setup leads to interpretable representations in the prototype neck, allowing visual inspection of the image content perceived by the model and a better understanding of the model's reliability. We show experimentally that our method incurs only a limited performance penalty, and we provide examples that demonstrate the quality of the explanations provided by our method, which we argue outweighs the performance penalty.