 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRuhr Hand Motion Catalog of Human Center-Out Transport Trajectories in 3D Task-Space Captured by a Redundant Measurement System
Dec 31, 2023Neurological conditions are a major source of movement disorders. Motion modelling and variability analysis have the potential to identify pathology but require profound data. We introduce a systematic dataset of 3D center-out task-space trajectories of human hand transport movements in a natural setting. The transport tasks of this study consist of grasping a cylindric object from a unified start position and transporting it to one of nine target locations in unconstrained operational space. The measurement procedure is automatized to record ten trials per target location. With that, the dataset consists of 90 movement trajectories for each hand of 31 participants without known movement disorders. The participants are aged between 21 and 78 years, covering a wide range. Data are recorded redundantly by both an optical tracking system and an IMU sensor. As opposed to the stationary capturing system, the IMU can be considered as a portable, low-cost and energy-efficient alternative to be implemented on embedded systems.
Instance-based Learning with Prototype Reduction for Real-Time Proportional Myocontrol: A Randomized User Study Demonstrating Accuracy-preserving Data Reduction for Prosthetic Embedded Systems
Aug 21, 2023This work presents the design, implementation and validation of learning techniques based on the kNN scheme for gesture detection in prosthetic control. To cope with high computational demands in instance-based prediction, methods of dataset reduction are evaluated considering real-time determinism to allow for the reliable integration into battery-powered portable devices. The influence of parameterization and varying proportionality schemes is analyzed, utilizing an eight-channel-sEMG armband. Besides offline cross-validation accuracy, success rates in real-time pilot experiments (online target achievement tests) are determined. Based on the assessment of specific dataset reduction techniques' adequacy for embedded control applications regarding accuracy and timing behaviour, Decision Surface Mapping (DSM) proves itself promising when applying kNN on the reduced set. A randomized, double-blind user study was conducted to evaluate the respective methods (kNN and kNN with DSM-reduction) against Ridge Regression (RR) and RR with Random Fourier Features (RR-RFF). The kNN-based methods performed significantly better (p<0.0005) than the regression techniques. Between DSM-kNN and kNN, there was no statistically significant difference (significance level 0.05). This is remarkable in consideration of only one sample per class in the reduced set, thus yielding a reduction rate of over 99% while preserving success rate. The same behaviour could be confirmed in an extended user study. With k=1, which turned out to be an excellent choice, the runtime complexity of both kNN (in every prediction step) as well as DSM-kNN (in the training phase) becomes linear concerning the number of original samples, favouring dependable wearable prosthesis applications.
KNN Learning Techniques for Proportional Myocontrol in Prosthetics
Sep 18, 2021
This work has been conducted in the context of pattern-recognition-based control for electromyographic prostheses. It presents a k-nearest neighbour (kNN) classification technique for gesture recognition, extended by a proportionality scheme. The methods proposed are practically implemented and validated. Datasets are captured by means of a state-of-the-art 8-channel electromyography (EMG) armband positioned on the forearm. Based on this data, the influence of kNN's parameters is analyzed in pilot experiments. Moreover, the effect of proportionality scaling and rest thresholding schemes is investigated. A randomized, double-blind user study is conducted to compare the implemented method with the state-of-research algorithm Ridge Regression with Random Fourier Features (RR-RFF) for different levels of gesture exertion. The results from these experiments show a statistically significant improvement in favour of the kNN-based algorithm.
Biologically Inspired Model for Timed Motion in Robotic Systems
Jul 29, 2021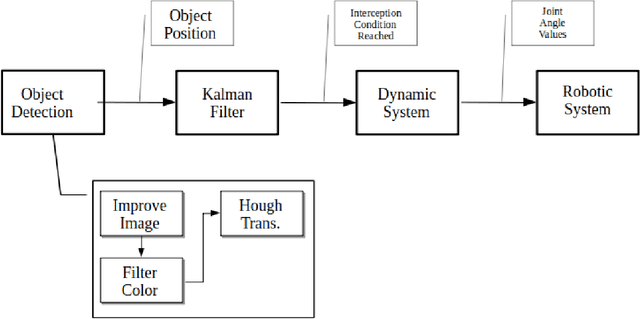

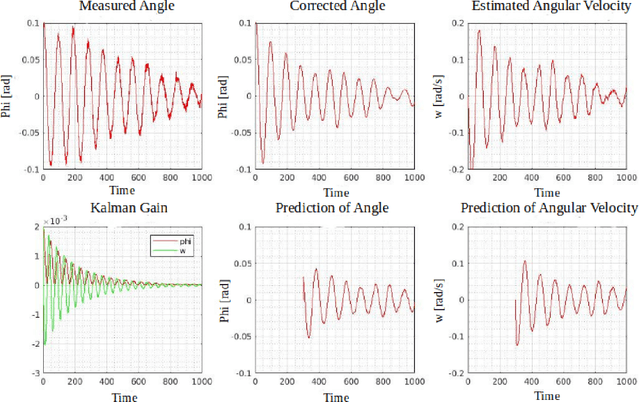
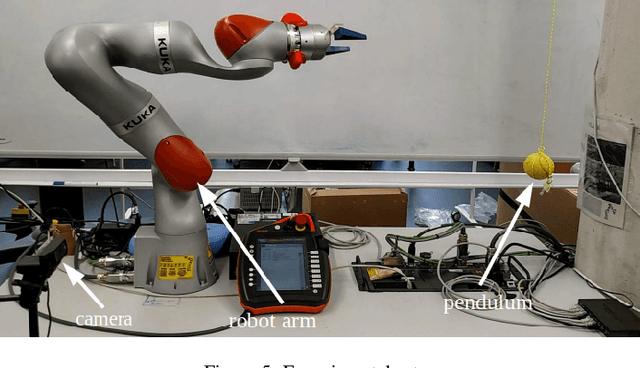
The goal of this work is the development of a motion model for sequentially timed movement actions in robotic systems under specific consideration of temporal stabilization, that is maintaining an approximately constant overall movement time (isochronous behavior). This is demonstrated both in simulation and on a physical robotic system for the task of intercepting a moving target in three-dimensional space. Motivated from humanoid motion, timing plays a vital role to generate a naturalistic behavior in interaction with the dynamic environment as well as adaptively planning and executing action sequences on-line. In biological systems, many of the physiological and anatomical functions follow a particular level of periodicity and stabilization, which exhibit a certain extent of resilience against external disturbances. A main aspect thereof is stabilizing movement timing against limited perturbations. Especially human arm movement, namely when it is tasked to reach a certain goal point, pose or configuration, shows a stabilizing behavior. This work incorporates the utilization of an extended Kalman filter (EKF) which was implemented to predict the target position while coping with non-linear system dynamics. The periodicity and temporal stabilization in biological systems was artificially generated by a Hopf oscillator, yielding a sinusoidal velocity profile for smooth and repeatable motion.