 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvancements in Upper Body Exoskeleton: Implementing Active Gravity Compensation with a Feedforward Controller
Sep 09, 2023



In this study, we present a feedforward control system designed for active gravity compensation on an upper body exoskeleton. The system utilizes only positional data from internal motor sensors to calculate torque, employing analytical control equations based on Newton-Euler Inverse Dynamics. Compared to feedback control systems, the feedforward approach offers several advantages. It eliminates the need for external torque sensors, resulting in reduced hardware complexity and weight. Moreover, the feedforward control exhibits a more proactive response, leading to enhanced performance. The exoskeleton used in the experiments is lightweight and comprises 4 Degrees of Freedom, closely mimicking human upper body kinematics and three-dimensional range of motion. We conducted tests on both hardware and simulations of the exoskeleton, demonstrating stable performance. The system maintained its position over an extended period, exhibiting minimal friction and avoiding undesired slewing.
Biologically Inspired Model for Timed Motion in Robotic Systems
Jul 29, 2021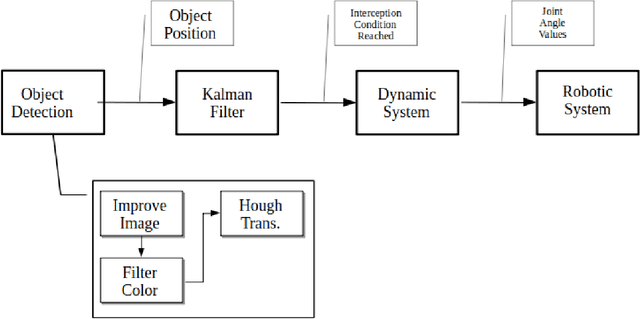

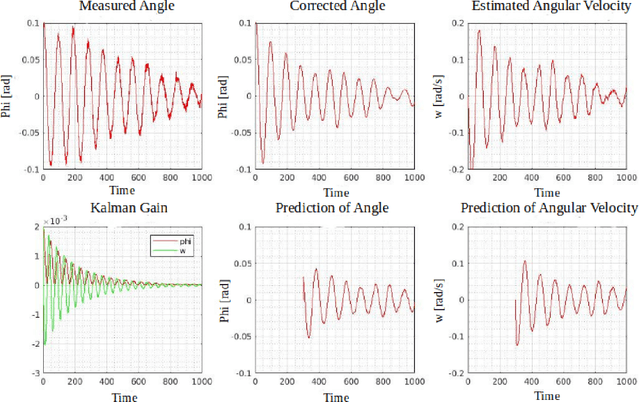
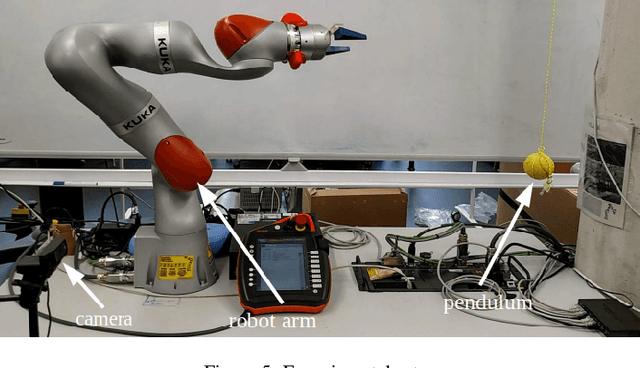
The goal of this work is the development of a motion model for sequentially timed movement actions in robotic systems under specific consideration of temporal stabilization, that is maintaining an approximately constant overall movement time (isochronous behavior). This is demonstrated both in simulation and on a physical robotic system for the task of intercepting a moving target in three-dimensional space. Motivated from humanoid motion, timing plays a vital role to generate a naturalistic behavior in interaction with the dynamic environment as well as adaptively planning and executing action sequences on-line. In biological systems, many of the physiological and anatomical functions follow a particular level of periodicity and stabilization, which exhibit a certain extent of resilience against external disturbances. A main aspect thereof is stabilizing movement timing against limited perturbations. Especially human arm movement, namely when it is tasked to reach a certain goal point, pose or configuration, shows a stabilizing behavior. This work incorporates the utilization of an extended Kalman filter (EKF) which was implemented to predict the target position while coping with non-linear system dynamics. The periodicity and temporal stabilization in biological systems was artificially generated by a Hopf oscillator, yielding a sinusoidal velocity profile for smooth and repeatable motion.