 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInstance-based Learning with Prototype Reduction for Real-Time Proportional Myocontrol: A Randomized User Study Demonstrating Accuracy-preserving Data Reduction for Prosthetic Embedded Systems
Aug 21, 2023This work presents the design, implementation and validation of learning techniques based on the kNN scheme for gesture detection in prosthetic control. To cope with high computational demands in instance-based prediction, methods of dataset reduction are evaluated considering real-time determinism to allow for the reliable integration into battery-powered portable devices. The influence of parameterization and varying proportionality schemes is analyzed, utilizing an eight-channel-sEMG armband. Besides offline cross-validation accuracy, success rates in real-time pilot experiments (online target achievement tests) are determined. Based on the assessment of specific dataset reduction techniques' adequacy for embedded control applications regarding accuracy and timing behaviour, Decision Surface Mapping (DSM) proves itself promising when applying kNN on the reduced set. A randomized, double-blind user study was conducted to evaluate the respective methods (kNN and kNN with DSM-reduction) against Ridge Regression (RR) and RR with Random Fourier Features (RR-RFF). The kNN-based methods performed significantly better (p<0.0005) than the regression techniques. Between DSM-kNN and kNN, there was no statistically significant difference (significance level 0.05). This is remarkable in consideration of only one sample per class in the reduced set, thus yielding a reduction rate of over 99% while preserving success rate. The same behaviour could be confirmed in an extended user study. With k=1, which turned out to be an excellent choice, the runtime complexity of both kNN (in every prediction step) as well as DSM-kNN (in the training phase) becomes linear concerning the number of original samples, favouring dependable wearable prosthesis applications.
KNN Learning Techniques for Proportional Myocontrol in Prosthetics
Sep 18, 2021
This work has been conducted in the context of pattern-recognition-based control for electromyographic prostheses. It presents a k-nearest neighbour (kNN) classification technique for gesture recognition, extended by a proportionality scheme. The methods proposed are practically implemented and validated. Datasets are captured by means of a state-of-the-art 8-channel electromyography (EMG) armband positioned on the forearm. Based on this data, the influence of kNN's parameters is analyzed in pilot experiments. Moreover, the effect of proportionality scaling and rest thresholding schemes is investigated. A randomized, double-blind user study is conducted to compare the implemented method with the state-of-research algorithm Ridge Regression with Random Fourier Features (RR-RFF) for different levels of gesture exertion. The results from these experiments show a statistically significant improvement in favour of the kNN-based algorithm.
Automatic Detection of Myocontrol Failures Based upon Situational Context Information
Jun 27, 2019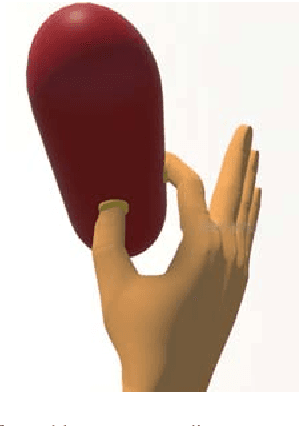
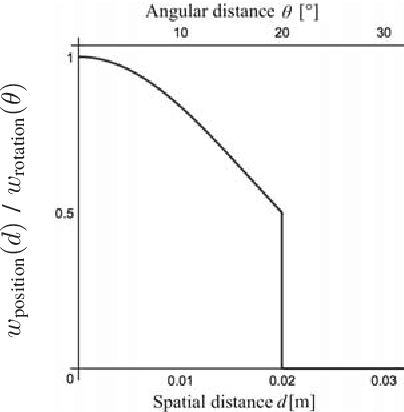
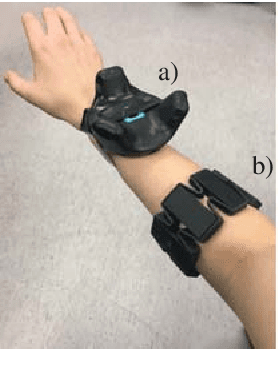
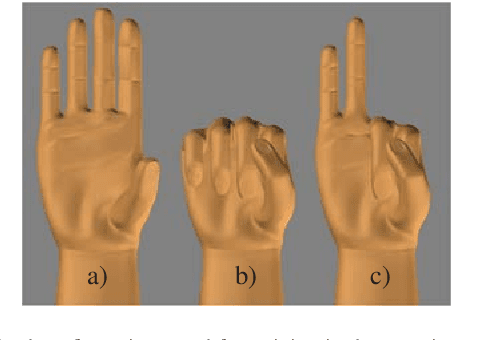
Myoelectric control systems for assistive devices are still unreliable. The user's input signals can become unstable over time due to e.g. fatigue, electrode displacement, or sweat. Hence, such controllers need to be constantly updated and heavily rely on user feedback. In this paper, we present an automatic failure detection method which learns when plausible predictions become unreliable and model updates are necessary. Our key insight is to enhance the control system with a set of generative models that learn sensible behaviour for a desired task from human demonstration. We illustrate our approach on a grasping scenario in Virtual Reality, in which the user is asked to grasp a bottle on a table. From demonstration our model learns the reach-to-grasp motion from a resting position to two grasps (power grasp and tridigital grasp) and how to predict the most adequate grasp from local context, e.g. tridigital grasp on the bottle cap or around the bottleneck. By measuring the error between new grasp attempts and the model prediction, the system can effectively detect which input commands do not reflect the user's intention. We evaluated our model in two cases: i) with both position and rotation information of the wrist pose, and ii) with only rotational information. Our results show that our approach detects statistically highly significant differences in error distributions with p < 0.001 between successful and failed grasp attempts in both cases.