 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResilient Channel Charting Under Varying Radio Link Availability
Feb 04, 2026Channel charting (CC) has become a key technology for RF-based localization, enabling unsupervised radio fingerprinting, even in non line of sight scenarios, with a minimum of reference position labels. However, most CC models assume fixed-size inputs, such as a constant number of antennas or channel measurements. In practical systems, antennas may fail, signals may be blocked, or antenna sets may change during handovers, making fixed-input architectures fragile. Existing radio-fingerprinting approaches address this by training separate models for each antenna configuration, but the resulting training effort scales prohibitively with the array size. We propose Adaptive Positioning (AdaPos), a CC architecture that natively handles variable numbers of channel measurements. AdaPos combines convolutional feature extraction with a transformer-based encoder using learnable antenna identifiers and self-attention to fuse arbitrary subsets of CSI inputs. Experiments on two public real-world datasets (SISO and MIMO) show that AdaPos maintains state-of-the-art accuracy under missing-antenna conditions and replaces roughly 57 configuration-specific models with a single unified model. With AdaPos and our novel training strategies, we provide resilience to both individual antenna failures and full-array outages.
Simplicity is Key: An Unsupervised Pretraining Approach for Sparse Radio Channels
May 19, 2025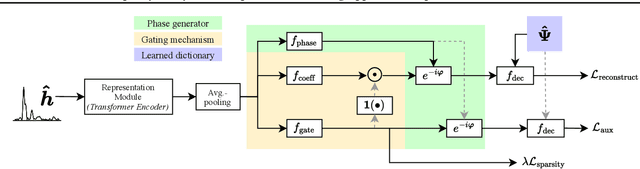

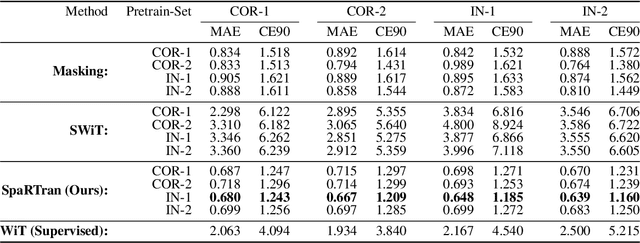
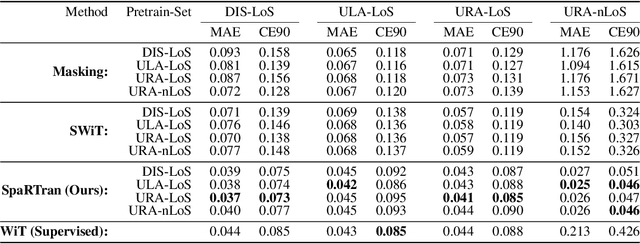
We introduce the Sparse pretrained Radio Transformer (SpaRTran), an unsupervised representation learning approach based on the concept of compressed sensing for radio channels. Our approach learns embeddings that focus on the physical properties of radio propagation, to create the optimal basis for fine-tuning on radio-based downstream tasks. SpaRTran uses a sparse gated autoencoder that induces a simplicity bias to the learned representations, resembling the sparse nature of radio propagation. For signal reconstruction, it learns a dictionary that holds atomic features, which increases flexibility across signal waveforms and spatiotemporal signal patterns. Our experiments show that SpaRTran reduces errors by up to 85 % compared to state-of-the-art methods when fine-tuned on radio fingerprinting, a challenging downstream task. In addition, our method requires less pretraining effort and offers greater flexibility, as we train it solely on individual radio signals. SpaRTran serves as an excellent base model that can be fine-tuned for various radio-based downstream tasks, effectively reducing the cost for labeling. In addition, it is significantly more versatile than existing methods and demonstrates superior generalization.
VAE-based Feature Disentanglement for Data Augmentation and Compression in Generalized GNSS Interference Classification
Apr 14, 2025Distributed learning and Edge AI necessitate efficient data processing, low-latency communication, decentralized model training, and stringent data privacy to facilitate real-time intelligence on edge devices while reducing dependency on centralized infrastructure and ensuring high model performance. In the context of global navigation satellite system (GNSS) applications, the primary objective is to accurately monitor and classify interferences that degrade system performance in distributed environments, thereby enhancing situational awareness. To achieve this, machine learning (ML) models can be deployed on low-resource devices, ensuring minimal communication latency and preserving data privacy. The key challenge is to compress ML models while maintaining high classification accuracy. In this paper, we propose variational autoencoders (VAEs) for disentanglement to extract essential latent features that enable accurate classification of interferences. We demonstrate that the disentanglement approach can be leveraged for both data compression and data augmentation by interpolating the lower-dimensional latent representations of signal power. To validate our approach, we evaluate three VAE variants - vanilla, factorized, and conditional generative - on four distinct datasets, including two collected in controlled indoor environments and two real-world highway datasets. Additionally, we conduct extensive hyperparameter searches to optimize performance. Our proposed VAE achieves a data compression rate ranging from 512 to 8,192 and achieves an accuracy up to 99.92%.
Evaluation of (Un-)Supervised Machine Learning Methods for GNSS Interference Classification with Real-World Data Discrepancies
Mar 31, 2025



The accuracy and reliability of vehicle localization on roads are crucial for applications such as self-driving cars, toll systems, and digital tachographs. To achieve accurate positioning, vehicles typically use global navigation satellite system (GNSS) receivers to validate their absolute positions. However, GNSS-based positioning can be compromised by interference signals, necessitating the identification, classification, determination of purpose, and localization of such interference to mitigate or eliminate it. Recent approaches based on machine learning (ML) have shown superior performance in monitoring interference. However, their feasibility in real-world applications and environments has yet to be assessed. Effective implementation of ML techniques requires training datasets that incorporate realistic interference signals, including real-world noise and potential multipath effects that may occur between transmitter, receiver, and satellite in the operational area. Additionally, these datasets require reference labels. Creating such datasets is often challenging due to legal restrictions, as causing interference to GNSS sources is strictly prohibited. Consequently, the performance of ML-based methods in practical applications remains unclear. To address this gap, we describe a series of large-scale measurement campaigns conducted in real-world settings at two highway locations in Germany and the Seetal Alps in Austria, and in large-scale controlled indoor environments. We evaluate the latest supervised ML-based methods to report on their performance in real-world settings and present the applicability of pseudo-labeling for unsupervised learning. We demonstrate the challenges of combining datasets due to data discrepancies and evaluate outlier detection, domain adaptation, and data augmentation techniques to present the models' capabilities to adapt to changes in the datasets.
* 34 pages, 25 figures
Multimodal-to-Text Prompt Engineering in Large Language Models Using Feature Embeddings for GNSS Interference Characterization
Jan 09, 2025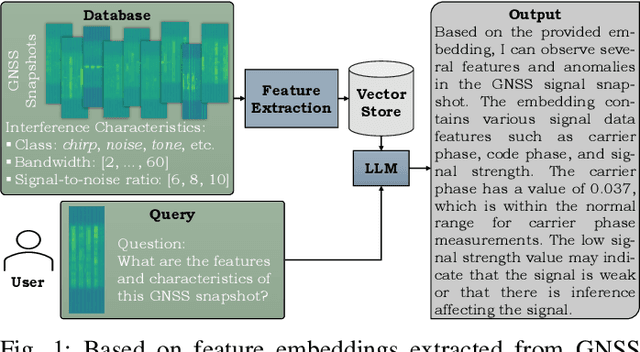



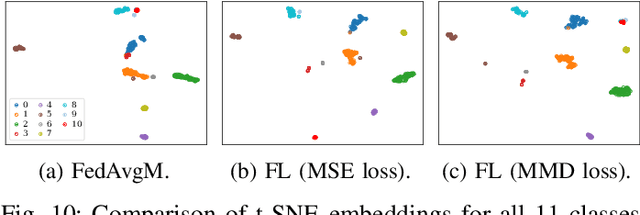
Large language models (LLMs) are advanced AI systems applied across various domains, including NLP, information retrieval, and recommendation systems. Despite their adaptability and efficiency, LLMs have not been extensively explored for signal processing tasks, particularly in the domain of global navigation satellite system (GNSS) interference monitoring. GNSS interference monitoring is essential to ensure the reliability of vehicle localization on roads, a critical requirement for numerous applications. However, GNSS-based positioning is vulnerable to interference from jamming devices, which can compromise its accuracy. The primary objective is to identify, classify, and mitigate these interferences. Interpreting GNSS snapshots and the associated interferences presents significant challenges due to the inherent complexity, including multipath effects, diverse interference types, varying sensor characteristics, and satellite constellations. In this paper, we extract features from a large GNSS dataset and employ LLaVA to retrieve relevant information from an extensive knowledge base. We employ prompt engineering to interpret the interferences and environmental factors, and utilize t-SNE to analyze the feature embeddings. Our findings demonstrate that the proposed method is capable of visual and logical reasoning within the GNSS context. Furthermore, our pipeline outperforms state-of-the-art machine learning models in interference classification tasks.
Federated Learning with MMD-based Early Stopping for Adaptive GNSS Interference Classification
Oct 21, 2024


Federated learning (FL) enables multiple devices to collaboratively train a global model while maintaining data on local servers. Each device trains the model on its local server and shares only the model updates (i.e., gradient weights) during the aggregation step. A significant challenge in FL is managing the feature distribution of novel, unbalanced data across devices. In this paper, we propose an FL approach using few-shot learning and aggregation of the model weights on a global server. We introduce a dynamic early stopping method to balance out-of-distribution classes based on representation learning, specifically utilizing the maximum mean discrepancy of feature embeddings between local and global models. An exemplary application of FL is orchestrating machine learning models along highways for interference classification based on snapshots from global navigation satellite system (GNSS) receivers. Extensive experiments on four GNSS datasets from two real-world highways and controlled environments demonstrate that our FL method surpasses state-of-the-art techniques in adapting to both novel interference classes and multipath scenarios.
Radio Foundation Models: Pre-training Transformers for 5G-based Indoor Localization
Oct 01, 2024Artificial Intelligence (AI)-based radio fingerprinting (FP) outperforms classic localization methods in propagation environments with strong multipath effects. However, the model and data orchestration of FP are time-consuming and costly, as it requires many reference positions and extensive measurement campaigns for each environment. Instead, modern unsupervised and self-supervised learning schemes require less reference data for localization, but either their accuracy is low or they require additional sensor information, rendering them impractical. In this paper we propose a self-supervised learning framework that pre-trains a general transformer (TF) neural network on 5G channel measurements that we collect on-the-fly without expensive equipment. Our novel pretext task randomly masks and drops input information to learn to reconstruct it. So, it implicitly learns the spatiotemporal patterns and information of the propagation environment that enable FP-based localization. Most interestingly, when we optimize this pre-trained model for localization in a given environment, it achieves the accuracy of state-of-the-art methods but requires ten times less reference data and significantly reduces the time from training to operation.
Bayesian Learning-driven Prototypical Contrastive Loss for Class-Incremental Learning
May 17, 2024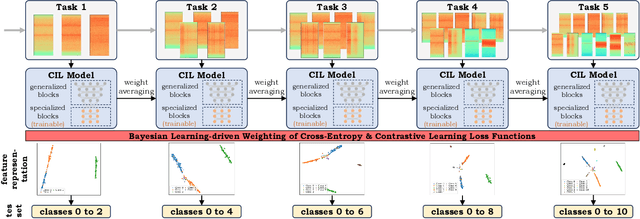
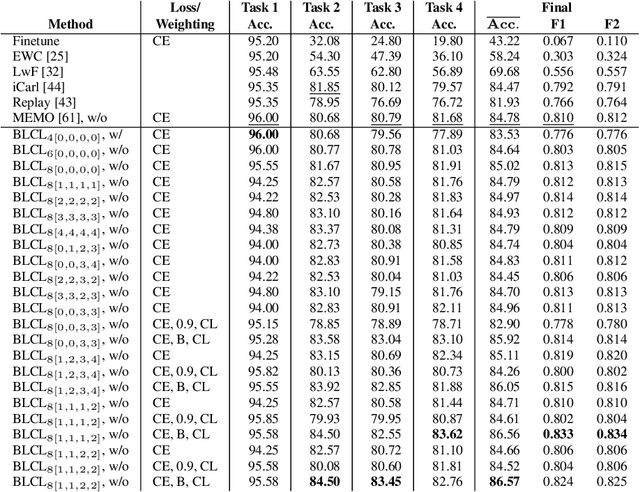
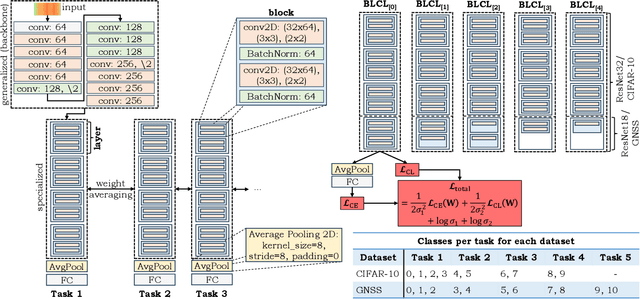
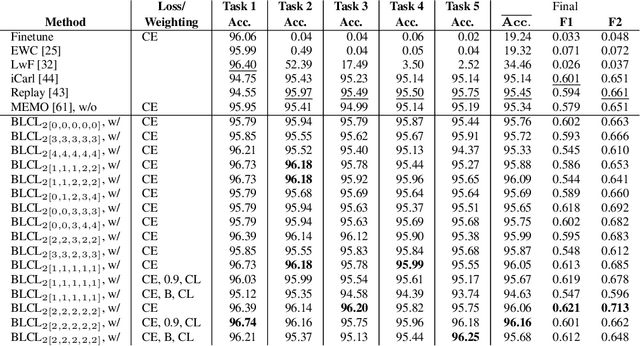
The primary objective of methods in continual learning is to learn tasks in a sequential manner over time from a stream of data, while mitigating the detrimental phenomenon of catastrophic forgetting. In this paper, we focus on learning an optimal representation between previous class prototypes and newly encountered ones. We propose a prototypical network with a Bayesian learning-driven contrastive loss (BLCL) tailored specifically for class-incremental learning scenarios. Therefore, we introduce a contrastive loss that incorporates new classes into the latent representation by reducing the intra-class distance and increasing the inter-class distance. Our approach dynamically adapts the balance between the cross-entropy and contrastive loss functions with a Bayesian learning technique. Empirical evaluations conducted on both the CIFAR-10 dataset for image classification and images of a GNSS-based dataset for interference classification validate the efficacy of our method, showcasing its superiority over existing state-of-the-art approaches.
Few-Shot Learning with Uncertainty-based Quadruplet Selection for Interference Classification in GNSS Data
Feb 09, 2024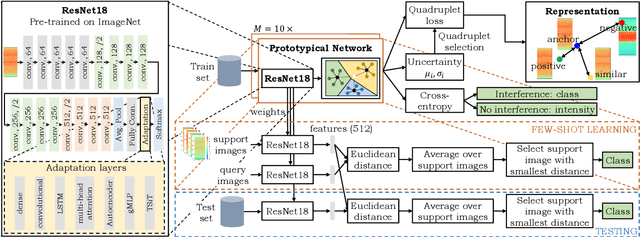

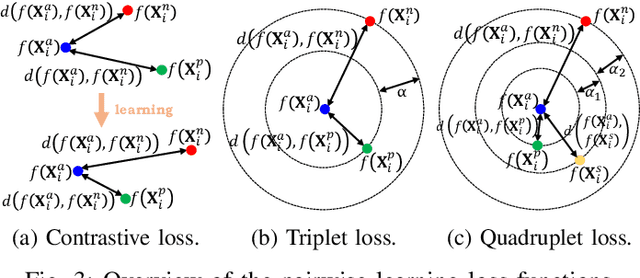
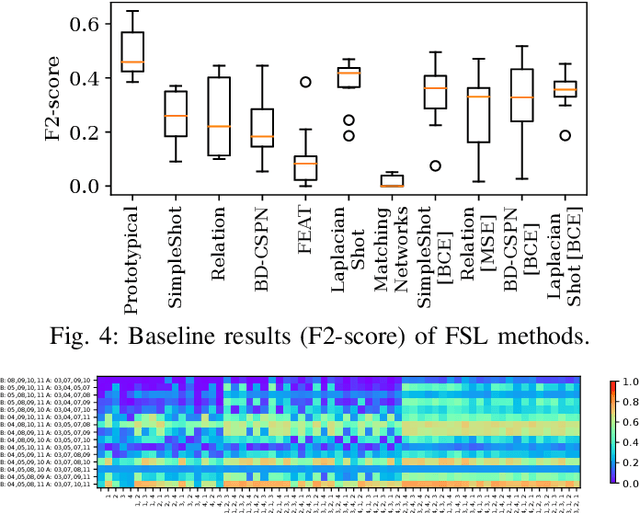
Jamming devices pose a significant threat by disrupting signals from the global navigation satellite system (GNSS), compromising the robustness of accurate positioning. Detecting anomalies in frequency snapshots is crucial to counteract these interferences effectively. The ability to adapt to diverse, unseen interference characteristics is essential for ensuring the reliability of GNSS in real-world applications. In this paper, we propose a few-shot learning (FSL) approach to adapt to new interference classes. Our method employs quadruplet selection for the model to learn representations using various positive and negative interference classes. Furthermore, our quadruplet variant selects pairs based on the aleatoric and epistemic uncertainty to differentiate between similar classes. We recorded a dataset at a motorway with eight interference classes on which our FSL method with quadruplet loss outperforms other FSL techniques in jammer classification accuracy with 97.66%.
Velocity-Based Channel Charting with Spatial Distribution Map Matching
Nov 14, 2023Fingerprint-based localization improves the positioning performance in challenging, non-line-of-sight (NLoS) dominated indoor environments. However, fingerprinting models require an expensive life-cycle management including recording and labeling of radio signals for the initial training and regularly at environmental changes. Alternatively, channel-charting avoids this labeling effort as it implicitly associates relative coordinates to the recorded radio signals. Then, with reference real-world coordinates (positions) we can use such charts for positioning tasks. However, current channel-charting approaches lag behind fingerprinting in their positioning accuracy and still require reference samples for localization, regular data recording and labeling to keep the models up to date. Hence, we propose a novel framework that does not require reference positions. We only require information from velocity information, e.g., from pedestrian dead reckoning or odometry to model the channel charts, and topological map information, e.g., a building floor plan, to transform the channel charts into real coordinates. We evaluate our approach on two different real-world datasets using 5G and distributed single-input/multiple-output system (SIMO) radio systems. Our experiments show that even with noisy velocity estimates and coarse map information, we achieve similar position accuracies