 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVAE-based Feature Disentanglement for Data Augmentation and Compression in Generalized GNSS Interference Classification
Apr 14, 2025Distributed learning and Edge AI necessitate efficient data processing, low-latency communication, decentralized model training, and stringent data privacy to facilitate real-time intelligence on edge devices while reducing dependency on centralized infrastructure and ensuring high model performance. In the context of global navigation satellite system (GNSS) applications, the primary objective is to accurately monitor and classify interferences that degrade system performance in distributed environments, thereby enhancing situational awareness. To achieve this, machine learning (ML) models can be deployed on low-resource devices, ensuring minimal communication latency and preserving data privacy. The key challenge is to compress ML models while maintaining high classification accuracy. In this paper, we propose variational autoencoders (VAEs) for disentanglement to extract essential latent features that enable accurate classification of interferences. We demonstrate that the disentanglement approach can be leveraged for both data compression and data augmentation by interpolating the lower-dimensional latent representations of signal power. To validate our approach, we evaluate three VAE variants - vanilla, factorized, and conditional generative - on four distinct datasets, including two collected in controlled indoor environments and two real-world highway datasets. Additionally, we conduct extensive hyperparameter searches to optimize performance. Our proposed VAE achieves a data compression rate ranging from 512 to 8,192 and achieves an accuracy up to 99.92%.
Evaluation of (Un-)Supervised Machine Learning Methods for GNSS Interference Classification with Real-World Data Discrepancies
Mar 31, 2025



The accuracy and reliability of vehicle localization on roads are crucial for applications such as self-driving cars, toll systems, and digital tachographs. To achieve accurate positioning, vehicles typically use global navigation satellite system (GNSS) receivers to validate their absolute positions. However, GNSS-based positioning can be compromised by interference signals, necessitating the identification, classification, determination of purpose, and localization of such interference to mitigate or eliminate it. Recent approaches based on machine learning (ML) have shown superior performance in monitoring interference. However, their feasibility in real-world applications and environments has yet to be assessed. Effective implementation of ML techniques requires training datasets that incorporate realistic interference signals, including real-world noise and potential multipath effects that may occur between transmitter, receiver, and satellite in the operational area. Additionally, these datasets require reference labels. Creating such datasets is often challenging due to legal restrictions, as causing interference to GNSS sources is strictly prohibited. Consequently, the performance of ML-based methods in practical applications remains unclear. To address this gap, we describe a series of large-scale measurement campaigns conducted in real-world settings at two highway locations in Germany and the Seetal Alps in Austria, and in large-scale controlled indoor environments. We evaluate the latest supervised ML-based methods to report on their performance in real-world settings and present the applicability of pseudo-labeling for unsupervised learning. We demonstrate the challenges of combining datasets due to data discrepancies and evaluate outlier detection, domain adaptation, and data augmentation techniques to present the models' capabilities to adapt to changes in the datasets.
* 34 pages, 25 figures
Bayesian Learning-driven Prototypical Contrastive Loss for Class-Incremental Learning
May 17, 2024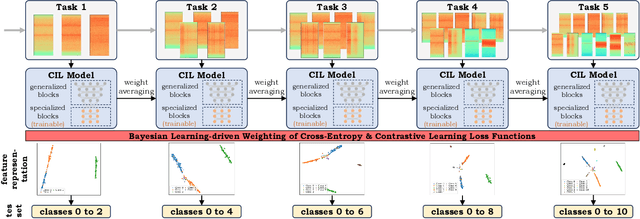
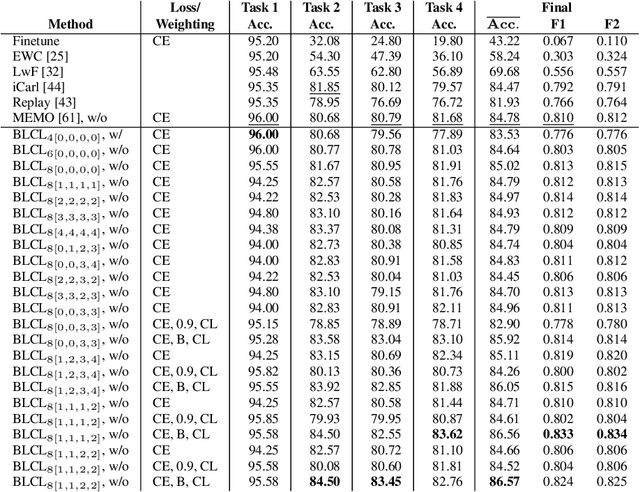
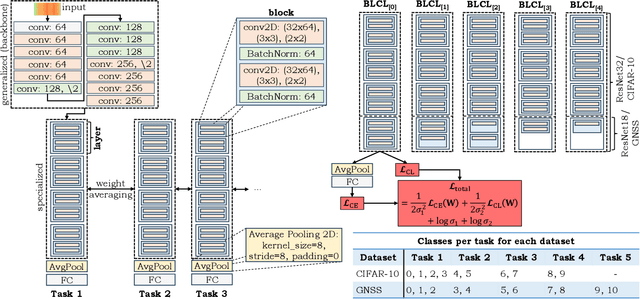
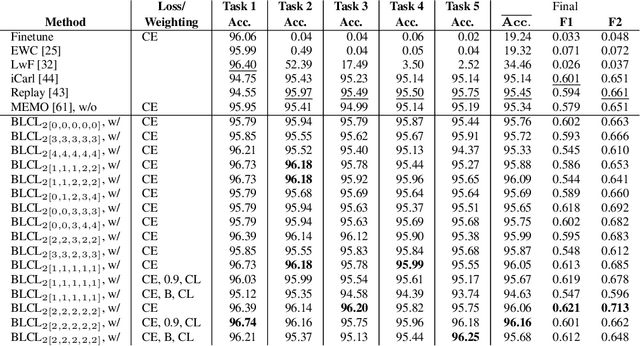
The primary objective of methods in continual learning is to learn tasks in a sequential manner over time from a stream of data, while mitigating the detrimental phenomenon of catastrophic forgetting. In this paper, we focus on learning an optimal representation between previous class prototypes and newly encountered ones. We propose a prototypical network with a Bayesian learning-driven contrastive loss (BLCL) tailored specifically for class-incremental learning scenarios. Therefore, we introduce a contrastive loss that incorporates new classes into the latent representation by reducing the intra-class distance and increasing the inter-class distance. Our approach dynamically adapts the balance between the cross-entropy and contrastive loss functions with a Bayesian learning technique. Empirical evaluations conducted on both the CIFAR-10 dataset for image classification and images of a GNSS-based dataset for interference classification validate the efficacy of our method, showcasing its superiority over existing state-of-the-art approaches.
Few-Shot Learning with Uncertainty-based Quadruplet Selection for Interference Classification in GNSS Data
Feb 09, 2024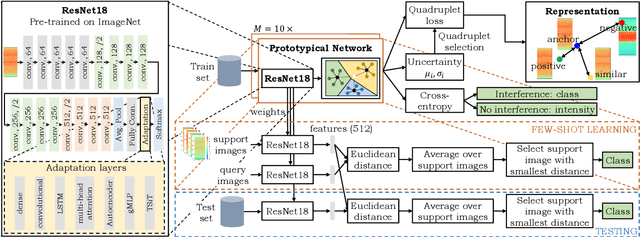

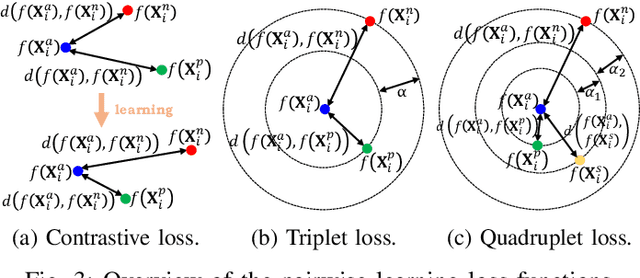
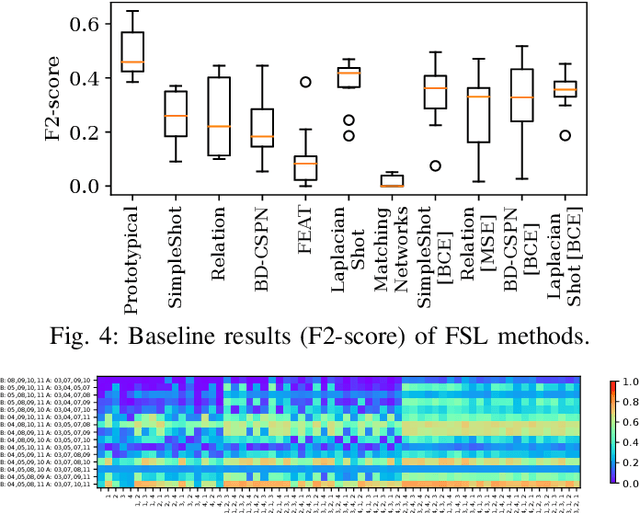
Jamming devices pose a significant threat by disrupting signals from the global navigation satellite system (GNSS), compromising the robustness of accurate positioning. Detecting anomalies in frequency snapshots is crucial to counteract these interferences effectively. The ability to adapt to diverse, unseen interference characteristics is essential for ensuring the reliability of GNSS in real-world applications. In this paper, we propose a few-shot learning (FSL) approach to adapt to new interference classes. Our method employs quadruplet selection for the model to learn representations using various positive and negative interference classes. Furthermore, our quadruplet variant selects pairs based on the aleatoric and epistemic uncertainty to differentiate between similar classes. We recorded a dataset at a motorway with eight interference classes on which our FSL method with quadruplet loss outperforms other FSL techniques in jammer classification accuracy with 97.66%.