 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResilient Channel Charting Under Varying Radio Link Availability
Feb 04, 2026Channel charting (CC) has become a key technology for RF-based localization, enabling unsupervised radio fingerprinting, even in non line of sight scenarios, with a minimum of reference position labels. However, most CC models assume fixed-size inputs, such as a constant number of antennas or channel measurements. In practical systems, antennas may fail, signals may be blocked, or antenna sets may change during handovers, making fixed-input architectures fragile. Existing radio-fingerprinting approaches address this by training separate models for each antenna configuration, but the resulting training effort scales prohibitively with the array size. We propose Adaptive Positioning (AdaPos), a CC architecture that natively handles variable numbers of channel measurements. AdaPos combines convolutional feature extraction with a transformer-based encoder using learnable antenna identifiers and self-attention to fuse arbitrary subsets of CSI inputs. Experiments on two public real-world datasets (SISO and MIMO) show that AdaPos maintains state-of-the-art accuracy under missing-antenna conditions and replaces roughly 57 configuration-specific models with a single unified model. With AdaPos and our novel training strategies, we provide resilience to both individual antenna failures and full-array outages.
Simplicity is Key: An Unsupervised Pretraining Approach for Sparse Radio Channels
May 19, 2025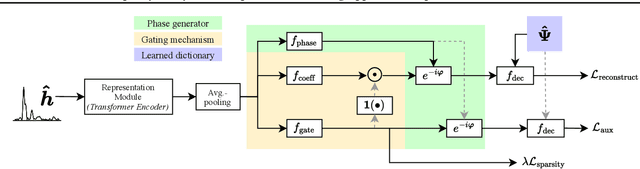

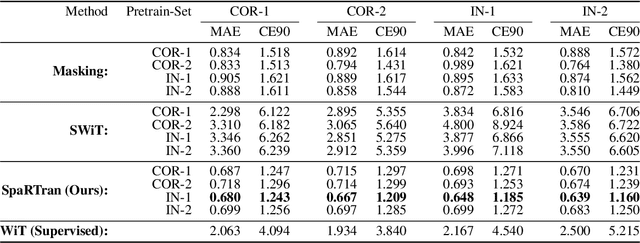
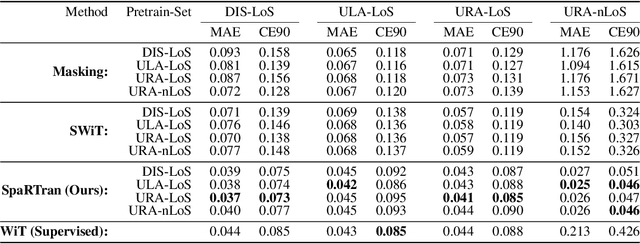
We introduce the Sparse pretrained Radio Transformer (SpaRTran), an unsupervised representation learning approach based on the concept of compressed sensing for radio channels. Our approach learns embeddings that focus on the physical properties of radio propagation, to create the optimal basis for fine-tuning on radio-based downstream tasks. SpaRTran uses a sparse gated autoencoder that induces a simplicity bias to the learned representations, resembling the sparse nature of radio propagation. For signal reconstruction, it learns a dictionary that holds atomic features, which increases flexibility across signal waveforms and spatiotemporal signal patterns. Our experiments show that SpaRTran reduces errors by up to 85 % compared to state-of-the-art methods when fine-tuned on radio fingerprinting, a challenging downstream task. In addition, our method requires less pretraining effort and offers greater flexibility, as we train it solely on individual radio signals. SpaRTran serves as an excellent base model that can be fine-tuned for various radio-based downstream tasks, effectively reducing the cost for labeling. In addition, it is significantly more versatile than existing methods and demonstrates superior generalization.
Radio Foundation Models: Pre-training Transformers for 5G-based Indoor Localization
Oct 01, 2024Artificial Intelligence (AI)-based radio fingerprinting (FP) outperforms classic localization methods in propagation environments with strong multipath effects. However, the model and data orchestration of FP are time-consuming and costly, as it requires many reference positions and extensive measurement campaigns for each environment. Instead, modern unsupervised and self-supervised learning schemes require less reference data for localization, but either their accuracy is low or they require additional sensor information, rendering them impractical. In this paper we propose a self-supervised learning framework that pre-trains a general transformer (TF) neural network on 5G channel measurements that we collect on-the-fly without expensive equipment. Our novel pretext task randomly masks and drops input information to learn to reconstruct it. So, it implicitly learns the spatiotemporal patterns and information of the propagation environment that enable FP-based localization. Most interestingly, when we optimize this pre-trained model for localization in a given environment, it achieves the accuracy of state-of-the-art methods but requires ten times less reference data and significantly reduces the time from training to operation.
Velocity-Based Channel Charting with Spatial Distribution Map Matching
Nov 14, 2023Fingerprint-based localization improves the positioning performance in challenging, non-line-of-sight (NLoS) dominated indoor environments. However, fingerprinting models require an expensive life-cycle management including recording and labeling of radio signals for the initial training and regularly at environmental changes. Alternatively, channel-charting avoids this labeling effort as it implicitly associates relative coordinates to the recorded radio signals. Then, with reference real-world coordinates (positions) we can use such charts for positioning tasks. However, current channel-charting approaches lag behind fingerprinting in their positioning accuracy and still require reference samples for localization, regular data recording and labeling to keep the models up to date. Hence, we propose a novel framework that does not require reference positions. We only require information from velocity information, e.g., from pedestrian dead reckoning or odometry to model the channel charts, and topological map information, e.g., a building floor plan, to transform the channel charts into real coordinates. We evaluate our approach on two different real-world datasets using 5G and distributed single-input/multiple-output system (SIMO) radio systems. Our experiments show that even with noisy velocity estimates and coarse map information, we achieve similar position accuracies
Indoor Localization with Robust Global Channel Charting: A Time-Distance-Based Approach
Oct 07, 2022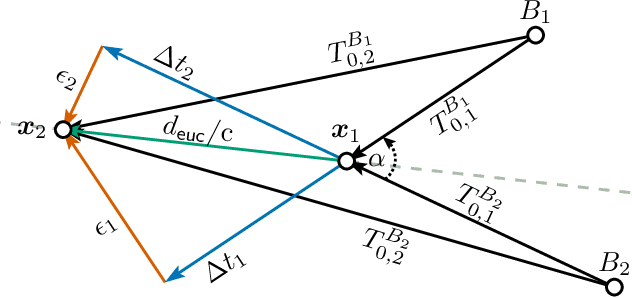
Fingerprinting-based positioning significantly improves the indoor localization performance in non-line-of-sight-dominated areas. However, its deployment and maintenance is cost-intensive as it needs ground-truth reference systems for both the initial training and the adaption to environmental changes. In contrast, channel charting (CC) works without explicit reference information and only requires the spatial correlations of channel state information (CSI). While CC has shown promising results in modelling the geometry of the radio environment, a deeper insight into CC for localization using multi-anchor large-bandwidth measurements is still pending. We contribute a novel distance metric for time-synchronized single-input/single-output CSIs that approaches a linear correlation to the Euclidean distance. This allows to learn the environment's global geometry without annotations. To efficiently optimize the global channel chart we approximate the metric with a Siamese neural network. This enables full CC-assisted fingerprinting and positioning only using a linear transformation from the chart to the real-world coordinates. We compare our approach to the state-of-the-art of CC on two different real-world data sets recorded with a 5G and UWB radio setup. Our approach outperforms others with localization accuracies of 0.69m for the UWB and 1.4m for the 5G setup. We show that CC-assisted fingerprinting enables highly accurate localization and reduces (or eliminates) the need for annotated training data.
Position Tracking using Likelihood Modeling of Channel Features with Gaussian Processes
Mar 24, 2022
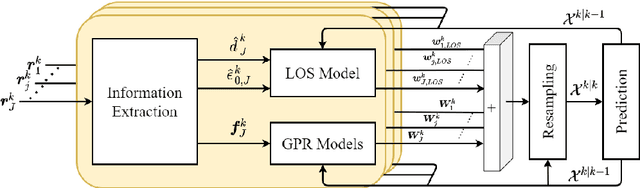
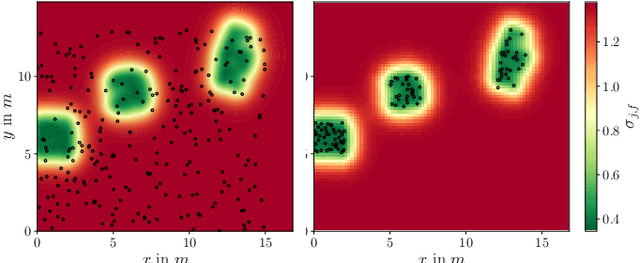
Recent localization frameworks exploit spatial information of complex channel measurements (CMs) to estimate accurate positions even in multipath propagation scenarios. State-of-the art CM fingerprinting(FP)-based methods employ convolutional neural networks (CNN) to extract the spatial information. However, they need spatially dense data sets (associated with high acquisition and maintenance efforts) to work well -- which is rarely the case in practical applications. If such data is not available (or its quality is low), we cannot compensate the performance degradation of CNN-based FP as they do not provide statistical position estimates, which prevents a fusion with other sources of information on the observation level. We propose a novel localization framework that adapts well to sparse datasets that only contain CMs of specific areas within the environment with strong multipath propagation. Our framework compresses CMs into informative features to unravel spatial information. It then regresses Gaussian processes (GPs) for each of them, which imply statistical observation models based on distance-dependent covariance kernels. Our framework combines the trained GPs with line-of-sight ranges and a dynamics model in a particle filter. Our measurements show that our approach outperforms state-of-the-art CNN fingerprinting (0.52 m vs. 1.3 m MAE) on spatially sparse data collected in a realistic industrial indoor environment.