 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTheoretical Limits of Backscatter Communications
Feb 27, 2023Backscatter communication is a hot candidate for future IoT systems. It offers the possibility for connectivity with tiny amounts of energy that can be easily obtained from energy harvesting. This is possible as backscatter devices do not actively transmit electromagnetic waves. Instead they only reflect existing electromagnetic waves by changing the antenna load. This fact leads to significant differences compared to classical communication wrt. the modulation schemes and achievable data rates. However, to our best knowledge nobody has so far systematically analyzed the achievable data rates and transmit ranges for different parameter configurations. Within this paper we derive theoretical bounds for backscatter communications based on classical information theory. We then use these bounds to analyze how different parameters - e.g. the distance, the frequency, or the transmit power - affect the achievable data rates. The bounds are derived for mono-static configuration, as well as for bi-static configurations. This allows feasibility analyses for different use-cases that are currently discussed in 3GPP and IEEE 802.
Position Tracking using Likelihood Modeling of Channel Features with Gaussian Processes
Mar 24, 2022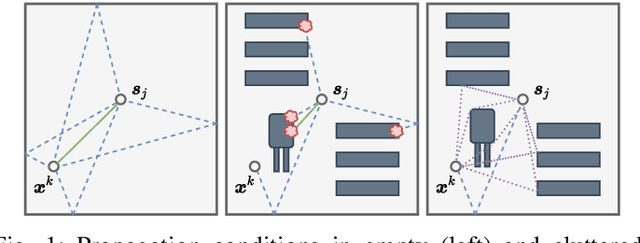
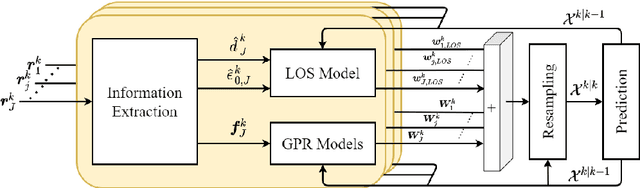
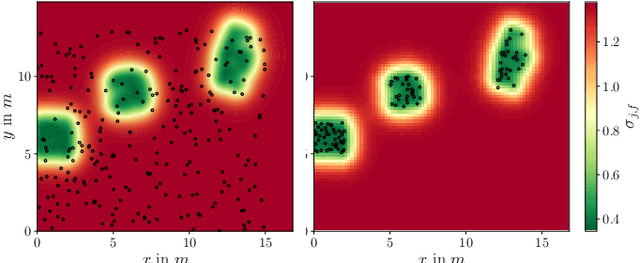
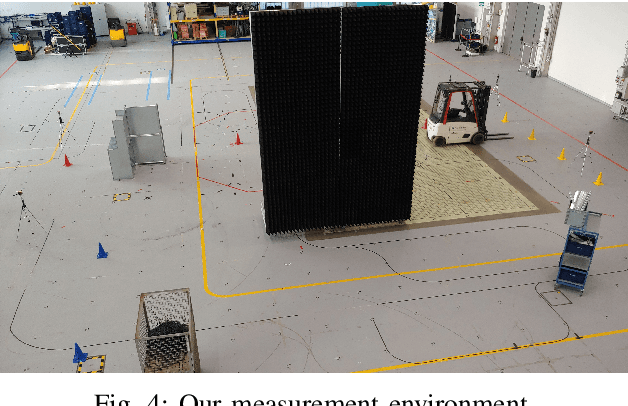
Recent localization frameworks exploit spatial information of complex channel measurements (CMs) to estimate accurate positions even in multipath propagation scenarios. State-of-the art CM fingerprinting(FP)-based methods employ convolutional neural networks (CNN) to extract the spatial information. However, they need spatially dense data sets (associated with high acquisition and maintenance efforts) to work well -- which is rarely the case in practical applications. If such data is not available (or its quality is low), we cannot compensate the performance degradation of CNN-based FP as they do not provide statistical position estimates, which prevents a fusion with other sources of information on the observation level. We propose a novel localization framework that adapts well to sparse datasets that only contain CMs of specific areas within the environment with strong multipath propagation. Our framework compresses CMs into informative features to unravel spatial information. It then regresses Gaussian processes (GPs) for each of them, which imply statistical observation models based on distance-dependent covariance kernels. Our framework combines the trained GPs with line-of-sight ranges and a dynamics model in a particle filter. Our measurements show that our approach outperforms state-of-the-art CNN fingerprinting (0.52 m vs. 1.3 m MAE) on spatially sparse data collected in a realistic industrial indoor environment.