 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNemotron 3 Nano Omni: Efficient and Open Multimodal Intelligence
Apr 27, 2026We introduce Nemotron 3 Nano Omni, the latest model in the Nemotron multimodal series and the first to natively support audio inputs alongside text, images, and video. Nemotron 3 Nano Omni delivers consistent accuracy improvements over its predecessor, Nemotron Nano V2 VL, across all modalities, enabled by advances in architecture, training data and recipes. In particular, Nemotron 3 delivers leading results in real-world document understanding, long audio-video comprehension, and agentic computer use. Built on the highly efficient Nemotron 3 Nano 30B-A3B backbone, Nemotron 3 Nano Omni further incorporates innovative multimodal token-reduction techniques to deliver substantially lower inference latency and higher throughput than other models of similar size. We are releasing model checkpoints in BF16, FP8, and FP4 formats, along with portions of the training data and codebase to facilitate further research and development.
NVIDIA Nemotron Nano V2 VL
Nov 07, 2025We introduce Nemotron Nano V2 VL, the latest model of the Nemotron vision-language series designed for strong real-world document understanding, long video comprehension, and reasoning tasks. Nemotron Nano V2 VL delivers significant improvements over our previous model, Llama-3.1-Nemotron-Nano-VL-8B, across all vision and text domains through major enhancements in model architecture, datasets, and training recipes. Nemotron Nano V2 VL builds on Nemotron Nano V2, a hybrid Mamba-Transformer LLM, and innovative token reduction techniques to achieve higher inference throughput in long document and video scenarios. We are releasing model checkpoints in BF16, FP8, and FP4 formats and sharing large parts of our datasets, recipes and training code.
Nemotron-H: A Family of Accurate and Efficient Hybrid Mamba-Transformer Models
Apr 10, 2025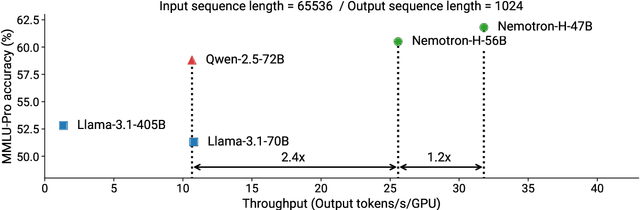

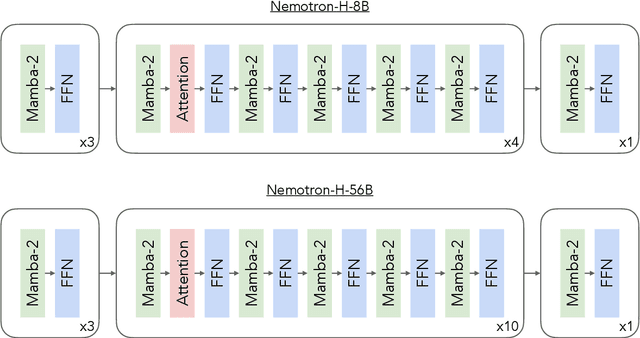
As inference-time scaling becomes critical for enhanced reasoning capabilities, it is increasingly becoming important to build models that are efficient to infer. We introduce Nemotron-H, a family of 8B and 56B/47B hybrid Mamba-Transformer models designed to reduce inference cost for a given accuracy level. To achieve this goal, we replace the majority of self-attention layers in the common Transformer model architecture with Mamba layers that perform constant computation and require constant memory per generated token. We show that Nemotron-H models offer either better or on-par accuracy compared to other similarly-sized state-of-the-art open-sourced Transformer models (e.g., Qwen-2.5-7B/72B and Llama-3.1-8B/70B), while being up to 3$\times$ faster at inference. To further increase inference speed and reduce the memory required at inference time, we created Nemotron-H-47B-Base from the 56B model using a new compression via pruning and distillation technique called MiniPuzzle. Nemotron-H-47B-Base achieves similar accuracy to the 56B model, but is 20% faster to infer. In addition, we introduce an FP8-based training recipe and show that it can achieve on par results with BF16-based training. This recipe is used to train the 56B model. All Nemotron-H models will be released, with support in Hugging Face, NeMo, and Megatron-LM.
Éclair -- Extracting Content and Layout with Integrated Reading Order for Documents
Feb 06, 2025



Optical Character Recognition (OCR) technology is widely used to extract text from images of documents, facilitating efficient digitization and data retrieval. However, merely extracting text is insufficient when dealing with complex documents. Fully comprehending such documents requires an understanding of their structure -- including formatting, formulas, tables, and the reading order of multiple blocks and columns across multiple pages -- as well as semantic information for detecting elements like footnotes and image captions. This comprehensive understanding is crucial for downstream tasks such as retrieval, document question answering, and data curation for training Large Language Models (LLMs) and Vision Language Models (VLMs). To address this, we introduce \'Eclair, a general-purpose text-extraction tool specifically designed to process a wide range of document types. Given an image, \'Eclair is able to extract formatted text in reading order, along with bounding boxes and their corresponding semantic classes. To thoroughly evaluate these novel capabilities, we introduce our diverse human-annotated benchmark for document-level OCR and semantic classification. \'Eclair achieves state-of-the-art accuracy on this benchmark, outperforming other methods across key metrics. Additionally, we evaluate \'Eclair on established benchmarks, demonstrating its versatility and strength across several evaluation standards.
Temporal Lidar Depth Completion
Jun 17, 2024Given the lidar measurements from an autonomous vehicle, we can project the points and generate a sparse depth image. Depth completion aims at increasing the resolution of such a depth image by infilling and interpolating the sparse depth values. Like most existing approaches, we make use of camera images as guidance in very sparse or occluded regions. In addition, we propose a temporal algorithm that utilizes information from previous timesteps using recurrence. In this work, we show how a state-of-the-art method PENet can be modified to benefit from recurrency. Our algorithm achieves state-of-the-art results on the KITTI depth completion dataset while adding only less than one percent of additional overhead in terms of both neural network parameters and floating point operations. The accuracy is especially improved for faraway objects and regions containing a low amount of lidar depth samples. Even in regions without any ground truth (like sky and rooftops) we observe large improvements which are not captured by the existing evaluation metrics.