 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferential privacy guarantees of Markov chain Monte Carlo algorithms
Feb 24, 2025This paper aims to provide differential privacy (DP) guarantees for Markov chain Monte Carlo (MCMC) algorithms. In a first part, we establish DP guarantees on samples output by MCMC algorithms as well as Monte Carlo estimators associated with these methods under assumptions on the convergence properties of the underlying Markov chain. In particular, our results highlight the critical condition of ensuring the target distribution is differentially private itself. In a second part, we specialise our analysis to the unadjusted Langevin algorithm and stochastic gradient Langevin dynamics and establish guarantees on their (R\'enyi) DP. To this end, we develop a novel methodology based on Girsanov's theorem combined with a perturbation trick to obtain bounds for an unbounded domain and in a non-convex setting. We establish: (i) uniform in $n$ privacy guarantees when the state of the chain after $n$ iterations is released, (ii) bounds on the privacy of the entire chain trajectory. These findings provide concrete guidelines for privacy-preserving MCMC.
The Performance Of The Unadjusted Langevin Algorithm Without Smoothness Assumptions
Feb 05, 2025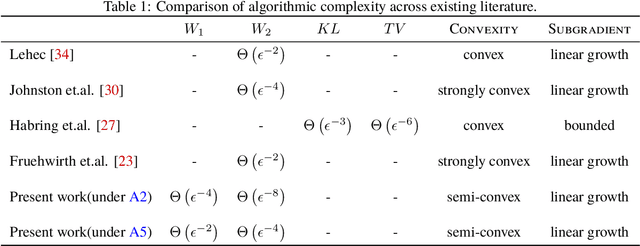
In this article, we study the problem of sampling from distributions whose densities are not necessarily smooth nor log-concave. We propose a simple Langevin-based algorithm that does not rely on popular but computationally challenging techniques, such as the Moreau Yosida envelope or Gaussian smoothing. We derive non-asymptotic guarantees for the convergence of the algorithm to the target distribution in Wasserstein distances. Non asymptotic bounds are also provided for the performance of the algorithm as an optimizer, specifically for the solution of associated excess risk optimization problems.
Taming the Interacting Particle Langevin Algorithm -- the superlinear case
Apr 03, 2024Recent advances in stochastic optimization have yielded the interactive particle Langevin algorithm (IPLA), which leverages the notion of interacting particle systems (IPS) to efficiently sample from approximate posterior densities. This becomes particularly crucial within the framework of Expectation-Maximization (EM), where the E-step is computationally challenging or even intractable. Although prior research has focused on scenarios involving convex cases with gradients of log densities that grow at most linearly, our work extends this framework to include polynomial growth. Taming techniques are employed to produce an explicit discretization scheme that yields a new class of stable, under such non-linearities, algorithms which are called tamed interactive particle Langevin algorithms (tIPLA). We obtain non-asymptotic convergence error estimates in Wasserstein-2 distance for the new class under an optimal rate.
Interacting Particle Langevin Algorithm for Maximum Marginal Likelihood Estimation
Mar 23, 2023


We study a class of interacting particle systems for implementing a marginal maximum likelihood estimation (MLE) procedure to optimize over the parameters of a latent variable model. To do so, we propose a continuous-time interacting particle system which can be seen as a Langevin diffusion over an extended state space, where the number of particles acts as the inverse temperature parameter in classical settings for optimisation. Using Langevin diffusions, we prove nonasymptotic concentration bounds for the optimisation error of the maximum marginal likelihood estimator in terms of the number of particles in the particle system, the number of iterations of the algorithm, and the step-size parameter for the time discretisation analysis.
Kinetic Langevin MCMC Sampling Without Gradient Lipschitz Continuity -- the Strongly Convex Case
Jan 19, 2023In this article we consider sampling from log concave distributions in Hamiltonian setting, without assuming that the objective gradient is globally Lipschitz. We propose two algorithms based on monotone polygonal (tamed) Euler schemes, to sample from a target measure, and provide non-asymptotic 2-Wasserstein distance bounds between the law of the process of each algorithm and the target measure. Finally, we apply these results to bound the excess risk optimization error of the associated optimization problem.