 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeC-GAIL: Stabilizing Generative Adversarial Imitation Learning with Control Theory
Feb 26, 2024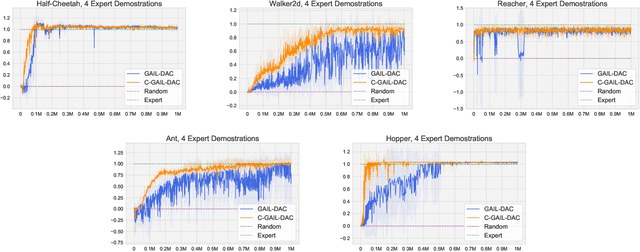

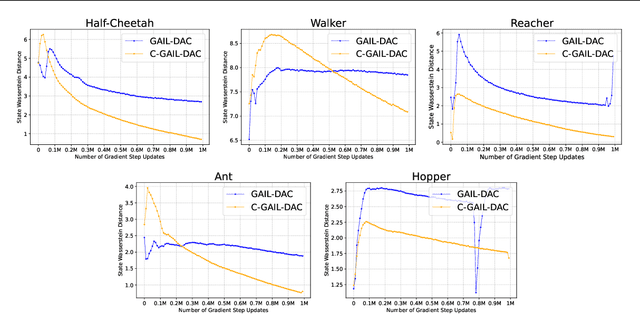
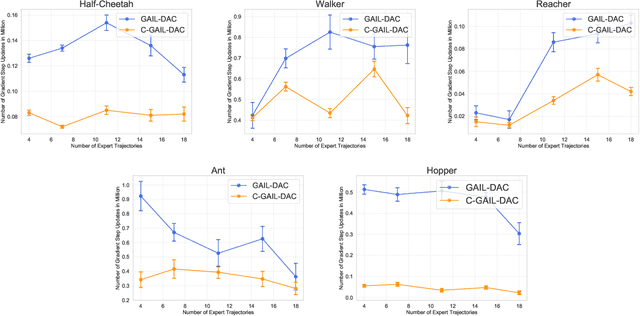
Generative Adversarial Imitation Learning (GAIL) trains a generative policy to mimic a demonstrator. It uses on-policy Reinforcement Learning (RL) to optimize a reward signal derived from a GAN-like discriminator. A major drawback of GAIL is its training instability - it inherits the complex training dynamics of GANs, and the distribution shift introduced by RL. This can cause oscillations during training, harming its sample efficiency and final policy performance. Recent work has shown that control theory can help with the convergence of a GAN's training. This paper extends this line of work, conducting a control-theoretic analysis of GAIL and deriving a novel controller that not only pushes GAIL to the desired equilibrium but also achieves asymptotic stability in a 'one-step' setting. Based on this, we propose a practical algorithm 'Controlled-GAIL' (C-GAIL). On MuJoCo tasks, our controlled variant is able to speed up the rate of convergence, reduce the range of oscillation and match the expert's distribution more closely both for vanilla GAIL and GAIL-DAC.
Stabilizing GANs' Training with Brownian Motion Controller
Jun 18, 2023

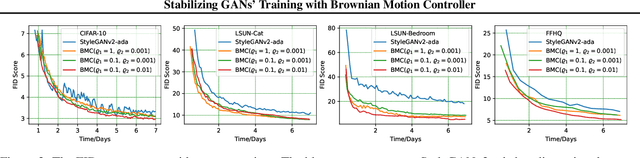

The training process of generative adversarial networks (GANs) is unstable and does not converge globally. In this paper, we examine the stability of GANs from the perspective of control theory and propose a universal higher-order noise-based controller called Brownian Motion Controller (BMC). Starting with the prototypical case of Dirac-GANs, we design a BMC to retrieve precisely the same but reachable optimal equilibrium. We theoretically prove that the training process of DiracGANs-BMC is globally exponential stable and derive bounds on the rate of convergence. Then we extend our BMC to normal GANs and provide implementation instructions on GANs-BMC. Our experiments show that our GANs-BMC effectively stabilizes GANs' training under StyleGANv2-ada frameworks with a faster rate of convergence, a smaller range of oscillation, and better performance in terms of FID score.