 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlowState: Sampling Rate Invariant Time Series Forecasting
Aug 07, 2025



Foundation models (FMs) have transformed natural language processing, but their success has not yet translated to time series forecasting. Existing time series foundation models (TSFMs), often based on transformer variants, struggle with generalization across varying context and target lengths, lack adaptability to different sampling rates, and are computationally inefficient. We introduce FlowState, a novel TSFM architecture that addresses these challenges through two key innovations: a state space model (SSM) based encoder and a functional basis decoder. This design enables continuous-time modeling and dynamic time-scale adjustment, allowing FlowState to inherently generalize across all possible temporal resolutions, and dynamically adjust the forecasting horizons. In contrast to other state-of-the-art TSFMs, which require training data across all possible sampling rates to memorize patterns at each scale, FlowState inherently adapts its internal dynamics to the input scale, enabling smaller models, reduced data requirements, and improved efficiency. We further propose an efficient pretraining strategy that improves robustness and accelerates training. Despite being the smallest model, FlowState outperforms all other models and is state-of-the-art for the GIFT-ZS and the Chronos-ZS benchmarks. Ablation studies confirm the effectiveness of its components, and we demonstrate its unique ability to adapt online to varying input sampling rates.
Mind the GAP: Glimpse-based Active Perception improves generalization and sample efficiency of visual reasoning
Sep 30, 2024Human capabilities in understanding visual relations are far superior to those of AI systems, especially for previously unseen objects. For example, while AI systems struggle to determine whether two such objects are visually the same or different, humans can do so with ease. Active vision theories postulate that the learning of visual relations is grounded in actions that we take to fixate objects and their parts by moving our eyes. In particular, the low-dimensional spatial information about the corresponding eye movements is hypothesized to facilitate the representation of relations between different image parts. Inspired by these theories, we develop a system equipped with a novel Glimpse-based Active Perception (GAP) that sequentially glimpses at the most salient regions of the input image and processes them at high resolution. Importantly, our system leverages the locations stemming from the glimpsing actions, along with the visual content around them, to represent relations between different parts of the image. The results suggest that the GAP is essential for extracting visual relations that go beyond the immediate visual content. Our approach reaches state-of-the-art performance on several visual reasoning tasks being more sample-efficient, and generalizing better to out-of-distribution visual inputs than prior models.
Learning-to-learn enables rapid learning with phase-change memory-based in-memory computing
Apr 22, 2024There is a growing demand for low-power, autonomously learning artificial intelligence (AI) systems that can be applied at the edge and rapidly adapt to the specific situation at deployment site. However, current AI models struggle in such scenarios, often requiring extensive fine-tuning, computational resources, and data. In contrast, humans can effortlessly adjust to new tasks by transferring knowledge from related ones. The concept of learning-to-learn (L2L) mimics this process and enables AI models to rapidly adapt with only little computational effort and data. In-memory computing neuromorphic hardware (NMHW) is inspired by the brain's operating principles and mimics its physical co-location of memory and compute. In this work, we pair L2L with in-memory computing NMHW based on phase-change memory devices to build efficient AI models that can rapidly adapt to new tasks. We demonstrate the versatility of our approach in two scenarios: a convolutional neural network performing image classification and a biologically-inspired spiking neural network generating motor commands for a real robotic arm. Both models rapidly learn with few parameter updates. Deployed on the NMHW, they perform on-par with their software equivalents. Moreover, meta-training of these models can be performed in software with high-precision, alleviating the need for accurate hardware models.
Efficient Biologically Plausible Adversarial Training
Oct 05, 2023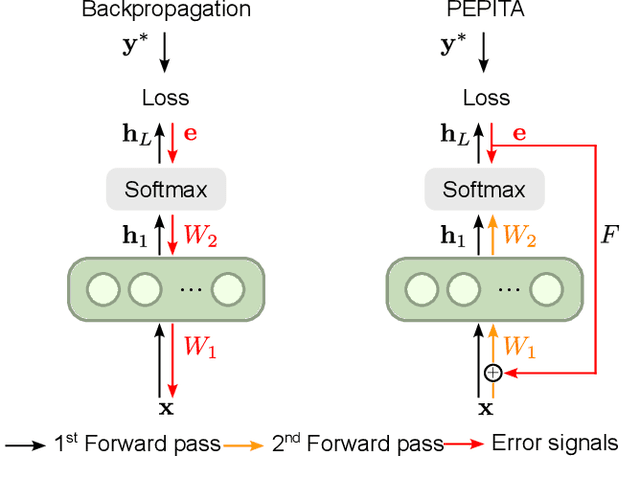


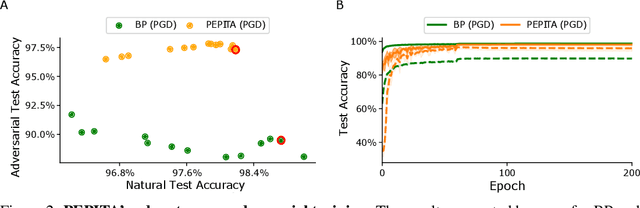
Artificial Neural Networks (ANNs) trained with Backpropagation (BP) show astounding performance and are increasingly often used in performing our daily life tasks. However, ANNs are highly vulnerable to adversarial attacks, which alter inputs with small targeted perturbations that drastically disrupt the models' performance. The most effective method to make ANNs robust against these attacks is adversarial training, in which the training dataset is augmented with exemplary adversarial samples. Unfortunately, this approach has the drawback of increased training complexity since generating adversarial samples is very computationally demanding. In contrast to ANNs, humans are not susceptible to adversarial attacks. Therefore, in this work, we investigate whether biologically-plausible learning algorithms are more robust against adversarial attacks than BP. In particular, we present an extensive comparative analysis of the adversarial robustness of BP and Present the Error to Perturb the Input To modulate Activity (PEPITA), a recently proposed biologically-plausible learning algorithm, on various computer vision tasks. We observe that PEPITA has higher intrinsic adversarial robustness and, with adversarial training, has a more favourable natural-vs-adversarial performance trade-off as, for the same natural accuracies, PEPITA's adversarial accuracies decrease in average by 0.26% and BP's by 8.05%.
Online Spatio-Temporal Learning with Target Projection
Apr 26, 2023



Recurrent neural networks trained with the backpropagation through time (BPTT) algorithm have led to astounding successes in various temporal tasks. However, BPTT introduces severe limitations, such as the requirement to propagate information backwards through time, the weight symmetry requirement, as well as update-locking in space and time. These problems become roadblocks for AI systems where online training capabilities are vital. Recently, researchers have developed biologically-inspired training algorithms, addressing a subset of those problems. In this work, we propose a novel learning algorithm called online spatio-temporal learning with target projection (OSTTP) that resolves all aforementioned issues of BPTT. In particular, OSTTP equips a network with the capability to simultaneously process and learn from new incoming data, alleviating the weight symmetry and update-locking problems. We evaluate OSTTP on two temporal tasks, showcasing competitive performance compared to BPTT. Moreover, we present a proof-of-concept implementation of OSTTP on a memristive neuromorphic hardware system, demonstrating its versatility and applicability to resource-constrained AI devices.