 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructural Decompositions for End-to-End Relighting
Jun 07, 2019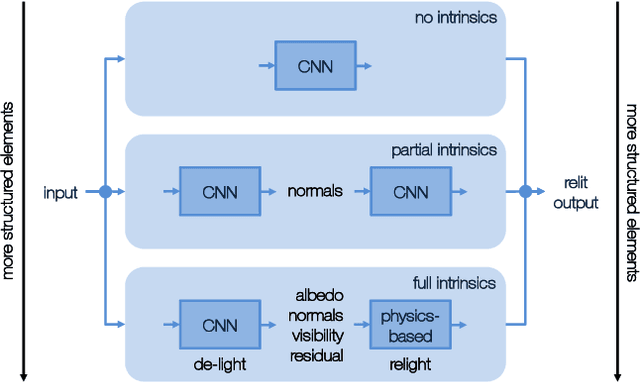
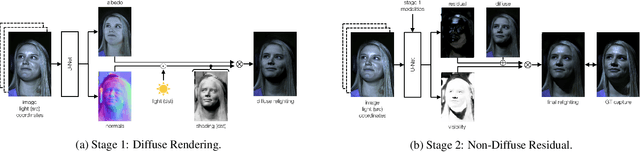
Relighting is an essential step in artificially transferring an object from one image into another environment. For example, a believable teleconference in Augmented Reality requires a portrait recorded in the source environment to be displayed and relit consistent with the light configuration of the destination scene. In this paper, we investigate architectures for learning to both de-light and relight an image of a human face end-to-end. The architectures vary in how much they enforce physically-based image formation and rendering constraints. The most structured model decomposes the input image into intrinsic components according to a diffuse physics-based image formation model and augments the render to relight including non-diffuse effects. An intermediate model uses fewer intrinsic constraints and the least structured model makes no assumptions on the image formation. To train our models and evaluate the approach, we collected portraits of 21 subjects with various expressions and poses, each in a sequence of 32 individual light sources in a controlled light stage setup. Our method leads to precise and believable relighting results in challenging illumination conditions and poses, including when the subject is facing away from the camera. We compare our method to state-of-the-art relighting approaches and illustrate its superiority in a series of quantitative and qualitative experiments.
Reflectance Adaptive Filtering Improves Intrinsic Image Estimation
Jun 12, 2017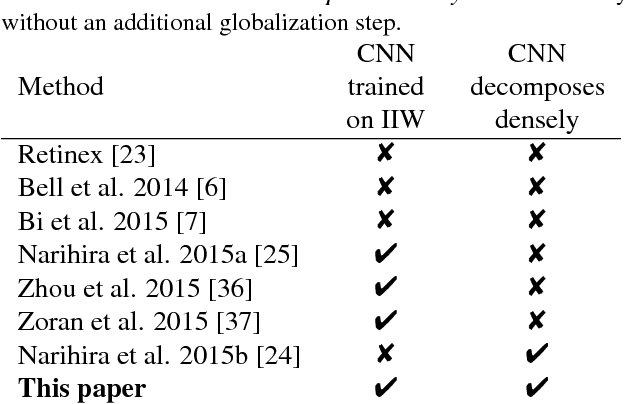
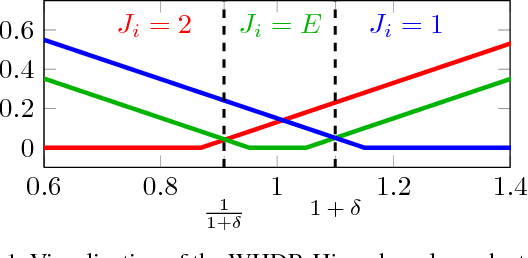
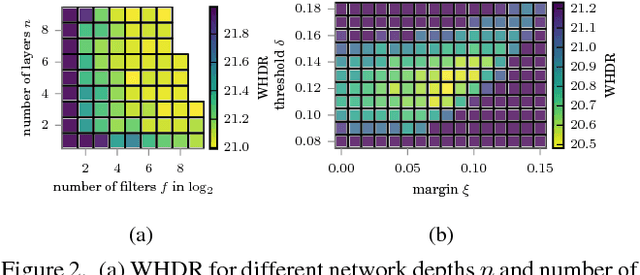
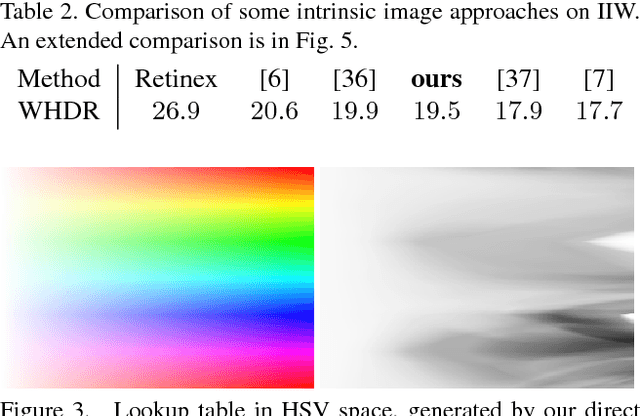
Separating an image into reflectance and shading layers poses a challenge for learning approaches because no large corpus of precise and realistic ground truth decompositions exists. The Intrinsic Images in the Wild~(IIW) dataset provides a sparse set of relative human reflectance judgments, which serves as a standard benchmark for intrinsic images. A number of methods use IIW to learn statistical dependencies between the images and their reflectance layer. Although learning plays an important role for high performance, we show that a standard signal processing technique achieves performance on par with current state-of-the-art. We propose a loss function for CNN learning of dense reflectance predictions. Our results show a simple pixel-wise decision, without any context or prior knowledge, is sufficient to provide a strong baseline on IIW. This sets a competitive baseline which only two other approaches surpass. We then develop a joint bilateral filtering method that implements strong prior knowledge about reflectance constancy. This filtering operation can be applied to any intrinsic image algorithm and we improve several previous results achieving a new state-of-the-art on IIW. Our findings suggest that the effect of learning-based approaches may have been over-estimated so far. Explicit prior knowledge is still at least as important to obtain high performance in intrinsic image decompositions.
Decentralized Simultaneous Multi-target Exploration using a Connected Network of Multiple Robots
Mar 16, 2017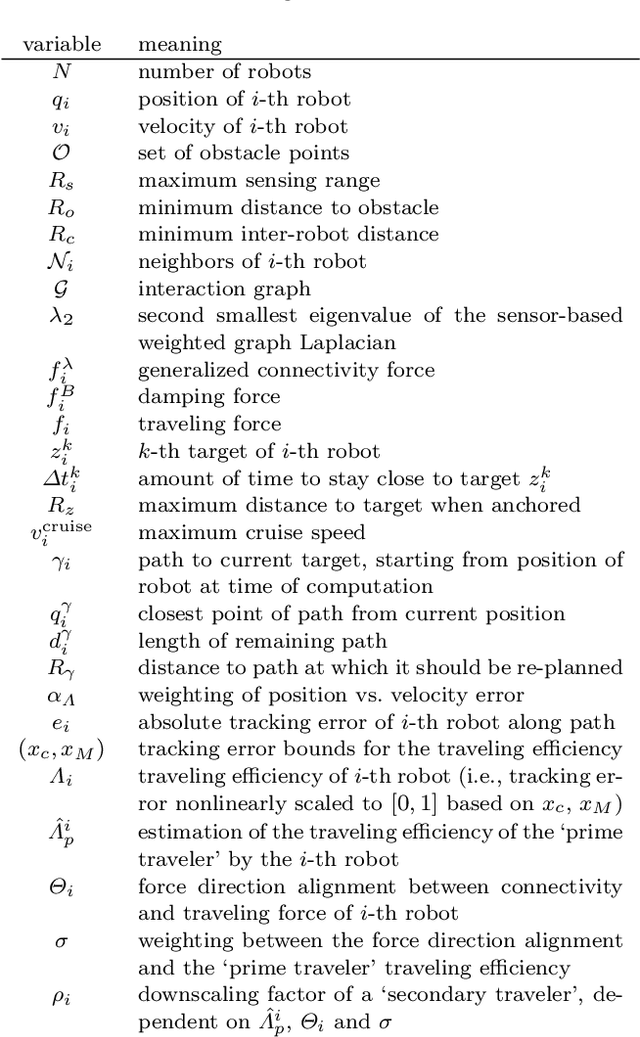
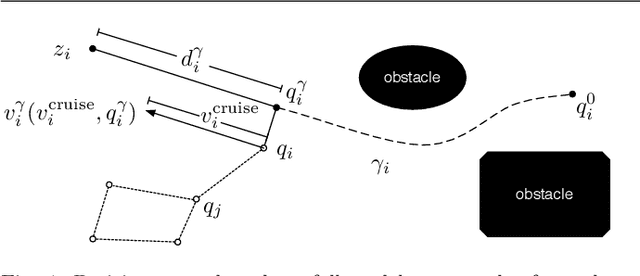
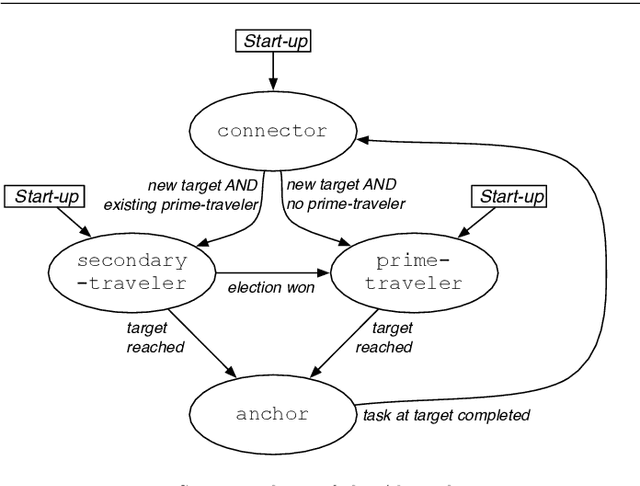
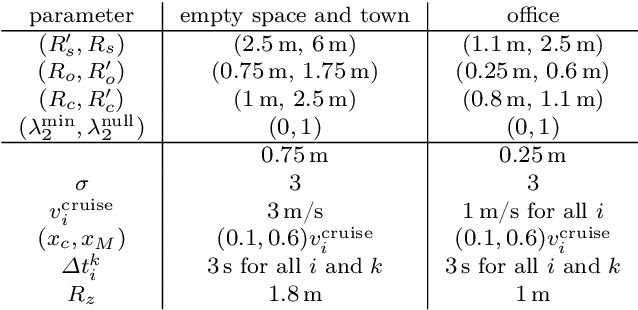
This paper presents a novel decentralized control strategy for a multi-robot system that enables parallel multi-target exploration while ensuring a time-varying connected topology in cluttered 3D environments. Flexible continuous connectivity is guaranteed by building upon a recent connectivity maintenance method, in which limited range, line-of-sight visibility, and collision avoidance are taken into account at the same time. Completeness of the decentralized multi-target exploration algorithm is guaranteed by dynamically assigning the robots with different motion behaviors during the exploration task. One major group is subject to a suitable downscaling of the main traveling force based on the traveling efficiency of the current leader and the direction alignment between traveling and connectivity force. This supports the leader in always reaching its current target and, on a larger time horizon, that the whole team realizes the overall task in finite time. Extensive Monte~Carlo simulations with a group of several quadrotor UAVs show the scalability and effectiveness of the proposed method and experiments validate its practicability.