 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe WayHome: Long-term Motion Prediction on Dynamically Scaled
Oct 06, 2023



One of the key challenges for autonomous vehicles is the ability to accurately predict the motion of other objects in the surrounding environment, such as pedestrians or other vehicles. In this contribution, a novel motion forecasting approach for autonomous vehicles is developed, inspired by the work of Gilles et al. [1]. We predict multiple heatmaps with a neuralnetwork-based model for every traffic participant in the vicinity of the autonomous vehicle; with one heatmap per timestep. The heatmaps are used as input to a novel sampling algorithm that extracts coordinates corresponding to the most likely future positions. We experiment with different encoders and decoders, as well as a comparison of two loss functions. Additionally, a new grid-scaling technique is introduced, showing further improved performance. Overall, our approach improves stateof-the-art miss rate performance for the function-relevant prediction interval of 3 seconds while being competitive in longer prediction intervals (up to eight seconds). The evaluation is done on the public 2022 Waymo motion challenge.
Mono Video-Based AI Corridor for Model-Free Detection of Collision-Relevant Obstacles
Apr 24, 2023The detection of previously unseen, unexpected obstacles on the road is a major challenge for automated driving systems. Different from the detection of ordinary objects with pre-definable classes, detecting unexpected obstacles on the road cannot be resolved by upscaling the sensor technology alone (e.g., high resolution video imagers / radar antennas, denser LiDAR scan lines). This is due to the fact, that there is a wide variety in the types of unexpected obstacles that also do not share a common appearance (e.g., lost cargo as a suitcase or bicycle, tire fragments, a tree stem). Also adding object classes or adding \enquote{all} of these objects to a common \enquote{unexpected obstacle} class does not scale. In this contribution, we study the feasibility of using a deep learning video-based lane corridor (called \enquote{AI ego-corridor}) to ease the challenge by inverting the problem: Instead of detecting a previously unseen object, the AI ego-corridor detects that the ego-lane ahead ends. A smart ground-truth definition enables an easy feature-based classification of an abrupt end of the ego-lane. We propose two neural network designs and research among other things the potential of training with synthetic data. We evaluate our approach on a test vehicle platform. It is shown that the approach is able to detect numerous previously unseen obstacles at a distance of up to 300 m with a detection rate of 95 %.
A System-driven Automatic Ground Truth Generation Method for DL Inner-City Driving Corridor Detectors
Jul 20, 2022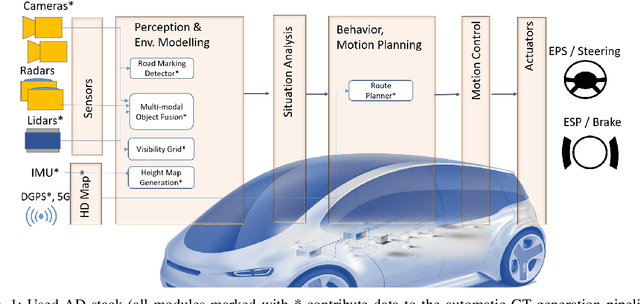
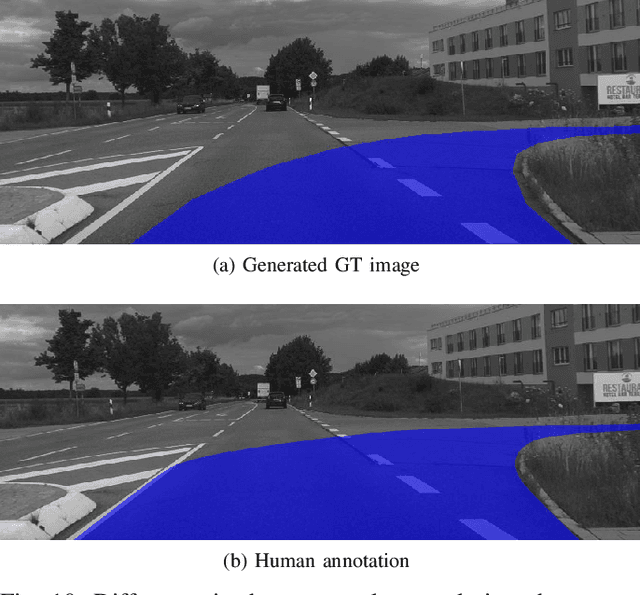
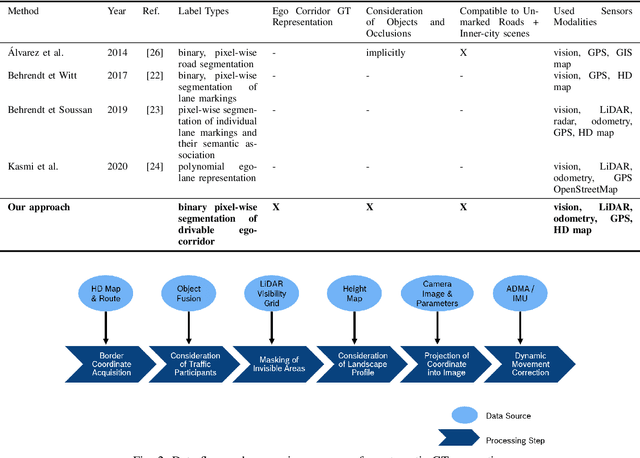
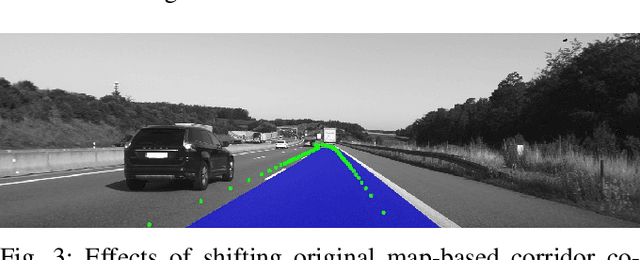
Data-driven perception approaches are well-established in automated driving systems. In many fields even super-human performance is reached. Unlike prediction and planning approaches, mainly supervised learning algorithms are used for the perception domain. Therefore, a major remaining challenge is the efficient generation of ground truth data. As perception modules are positioned close to the sensor, they typically run on raw sensor data of high bandwidth. Due to that, the generation of ground truth labels typically causes a significant manual effort, which leads to high costs for the labelling itself and the necessary quality control. In this contribution, we propose an automatic labeling approach for semantic segmentation of the drivable ego corridor that reduces the manual effort by a factor of 150 and more. The proposed holistic approach could be used in an automated data loop, allowing a continuous improvement of the depending perception modules.
* 8 pages
Where can I drive? Deep Ego-Corridor Estimation for Robust Automated Driving
Apr 16, 2020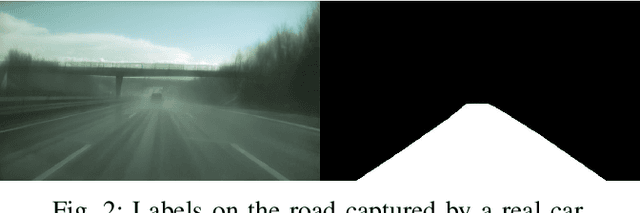
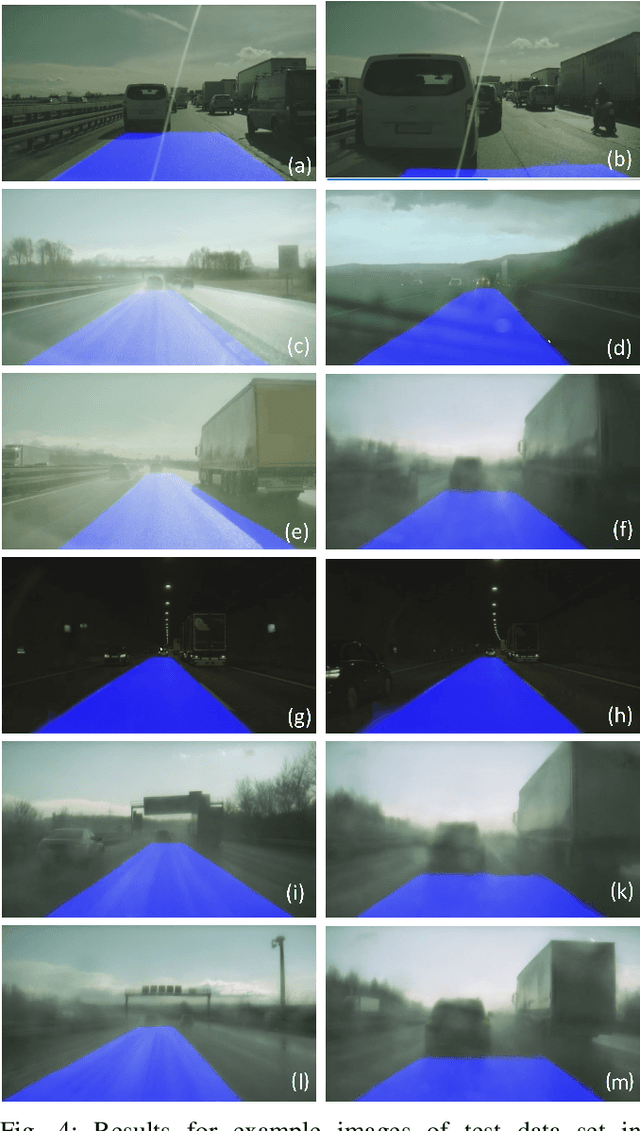

Lane detection is an essential part of the perception module of any automated driving (AD) or advanced driver assistance system (ADAS). So far, model-driven approaches for the detection of lane markings proved sufficient. More recently, however data-driven approaches have been proposed that show superior results. These deep learning approaches typically propose a classification of the free-space using for example semantic segmentation. While these examples focus and optimize on unmarked inner-city roads, we believe that mapless driving in complex highway scenarios is still not handled with sufficient robustness and availability. Especially in challenging weather situations such as heavy rain, fog at night or reflections in puddles, the reliable detection of lane markings will decrease significantly or completely fail with low-cost video-only AD systems. Therefore, we propose to specifically classify a drivable corridor in the ego-lane on a pixel level with a deep learning approach. Our approach is intentionally kept simple with only 660k parameters. Thus, we were able to easily integrate our algorithm into an online AD system of a test vehicle. We demonstrate the performance of our approach under challenging conditions qualitatively and quantitatively in comparison to a state-of-the-art model-driven approach. We see the current approach as a fallback method whenever a model-driven approach cannot cope with a specific scenario. Due to this, a fallback method does not have to fulfill the same requirements on comfort in lateral control as the primary algorithm: Its task is to catch the temporal shortcomings of the main perception task.