 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHospitalization Length of Stay Prediction using Patient Event Sequences
Mar 20, 2023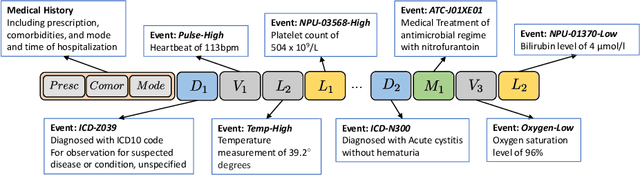
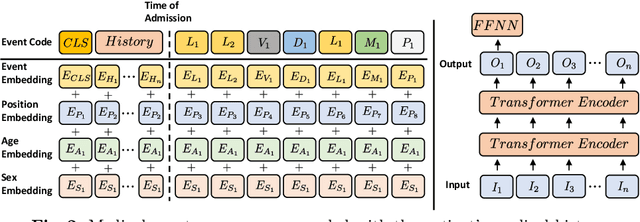
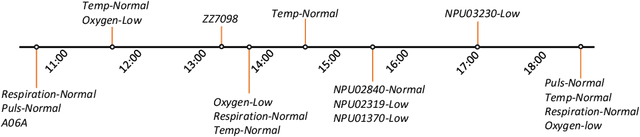
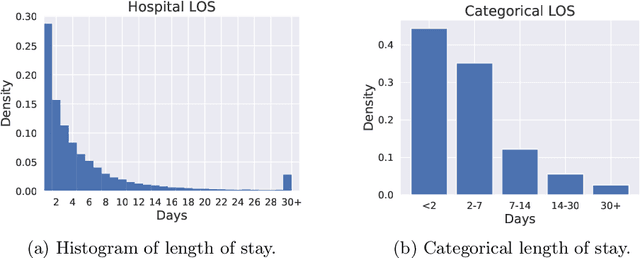
Predicting patients hospital length of stay (LOS) is essential for improving resource allocation and supporting decision-making in healthcare organizations. This paper proposes a novel approach for predicting LOS by modeling patient information as sequences of events. Specifically, we present a transformer-based model, termed Medic-BERT (M-BERT), for LOS prediction using the unique features describing patients medical event sequences. We performed empirical experiments on a cohort of more than 45k emergency care patients from a large Danish hospital. Experimental results show that M-BERT can achieve high accuracy on a variety of LOS problems and outperforms traditional nonsequence-based machine learning approaches.
Graph Neural Networks for Microbial Genome Recovery
Apr 26, 2022
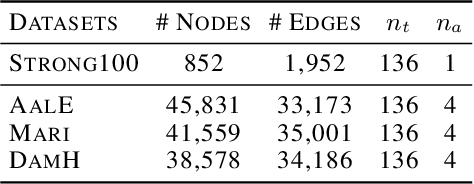
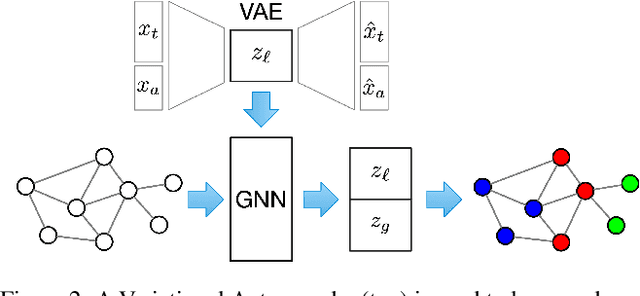
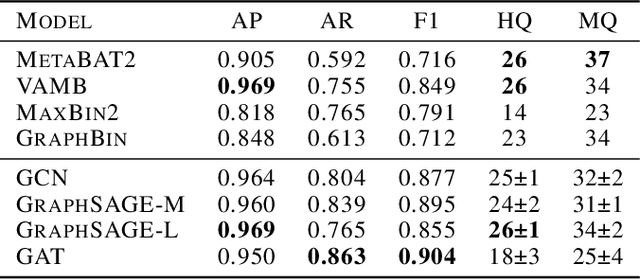
Microbes have a profound impact on our health and environment, but our understanding of the diversity and function of microbial communities is severely limited. Through DNA sequencing of microbial communities (metagenomics), DNA fragments (reads) of the individual microbes can be obtained, which through assembly graphs can be combined into long contiguous DNA sequences (contigs). Given the complexity of microbial communities, single contig microbial genomes are rarely obtained. Instead, contigs are eventually clustered into bins, with each bin ideally making up a full genome. This process is referred to as metagenomic binning. Current state-of-the-art techniques for metagenomic binning rely only on the local features for the individual contigs. These techniques therefore fail to exploit the similarities between contigs as encoded by the assembly graph, in which the contigs are organized. In this paper, we propose to use Graph Neural Networks (GNNs) to leverage the assembly graph when learning contig representations for metagenomic binning. Our method, VaeG-Bin, combines variational autoencoders for learning latent representations of the individual contigs, with GNNs for refining these representations by taking into account the neighborhood structure of the contigs in the assembly graph. We explore several types of GNNs and demonstrate that VaeG-Bin recovers more high-quality genomes than other state-of-the-art binners on both simulated and real-world datasets.
Inducing Gaussian Process Networks
Apr 21, 2022
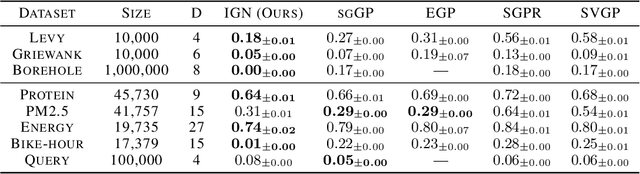

Gaussian processes (GPs) are powerful but computationally expensive machine learning models, requiring an estimate of the kernel covariance matrix for every prediction. In large and complex domains, such as graphs, sets, or images, the choice of suitable kernel can also be non-trivial to determine, providing an additional obstacle to the learning task. Over the last decade, these challenges have resulted in significant advances being made in terms of scalability and expressivity, exemplified by, e.g., the use of inducing points and neural network kernel approximations. In this paper, we propose inducing Gaussian process networks (IGN), a simple framework for simultaneously learning the feature space as well as the inducing points. The inducing points, in particular, are learned directly in the feature space, enabling a seamless representation of complex structured domains while also facilitating scalable gradient-based learning methods. We consider both regression and (binary) classification tasks and report on experimental results for real-world data sets showing that IGNs provide significant advances over state-of-the-art methods. We also demonstrate how IGNs can be used to effectively model complex domains using neural network architectures.
UniTE -- The Best of Both Worlds: Unifying Function-Fitting and Aggregation-Based Approaches to Travel Time and Travel Speed Estimation
Apr 27, 2021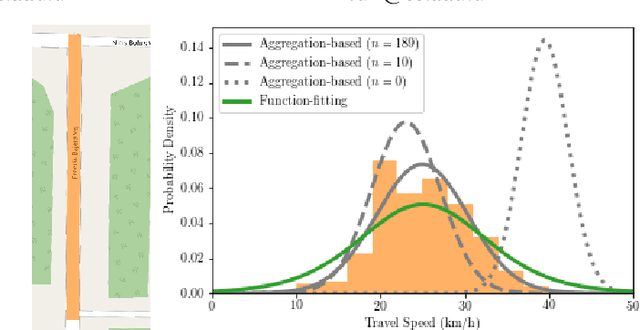
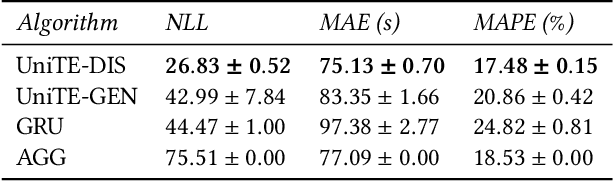
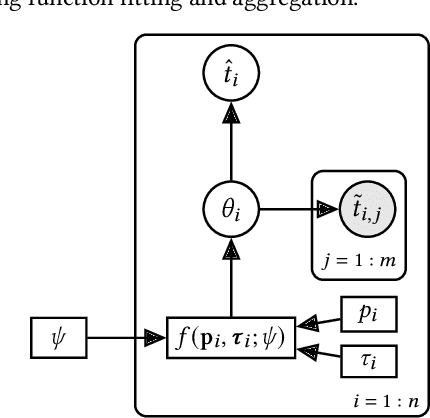
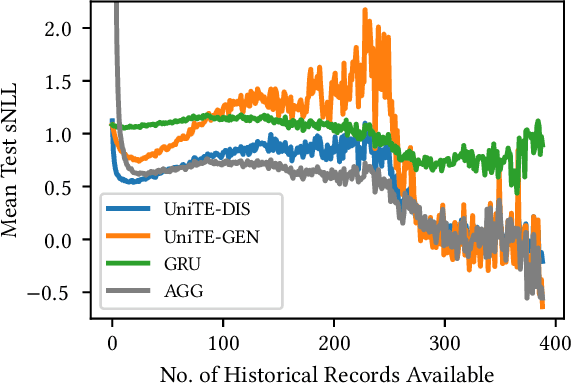
Travel time or speed estimation are part of many intelligent transportation applications. Existing estimation approaches rely on either function fitting or aggregation and represent different trade-offs between generalizability and accuracy. Function-fitting approaches learn functions that map feature vectors of, e.g., routes, to travel time or speed estimates, which enables generalization to unseen routes. However, mapping functions are imperfect and offer poor accuracy in practice. Aggregation-based approaches instead form estimates by aggregating historical data, e.g., traversal data for routes. This enables very high accuracy given sufficient data. However, they rely on simplistic heuristics when insufficient data is available, yielding poor generalizability. We present a Unifying approach to Travel time and speed Estimation (UniTE) that combines function-fitting and aggregation-based approaches into a unified framework that aims to achieve the generalizability of function-fitting approaches and the accuracy of aggregation-based approaches. An empirical study finds that an instance of UniTE can improve the accuracies of travel speed distribution and travel time estimation by $40-64\%$ and $3-23\%$, respectively, compared to using function fitting or aggregation alone
Relational Fusion Networks: Graph Convolutional Networks for Road Networks
Jun 16, 2020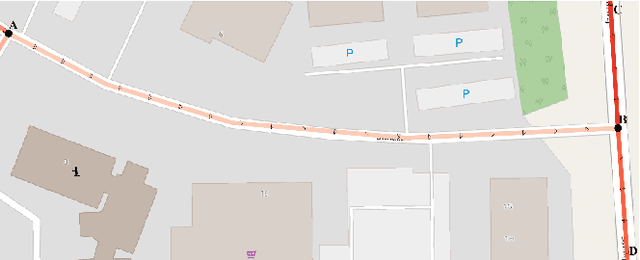
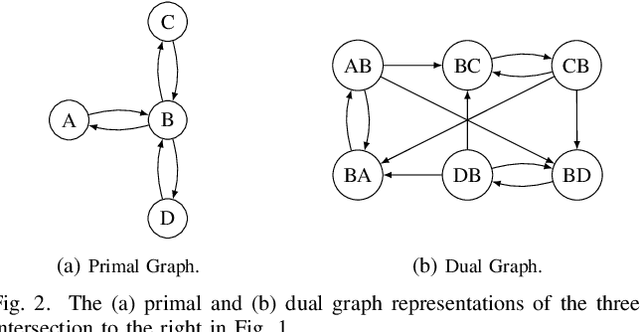
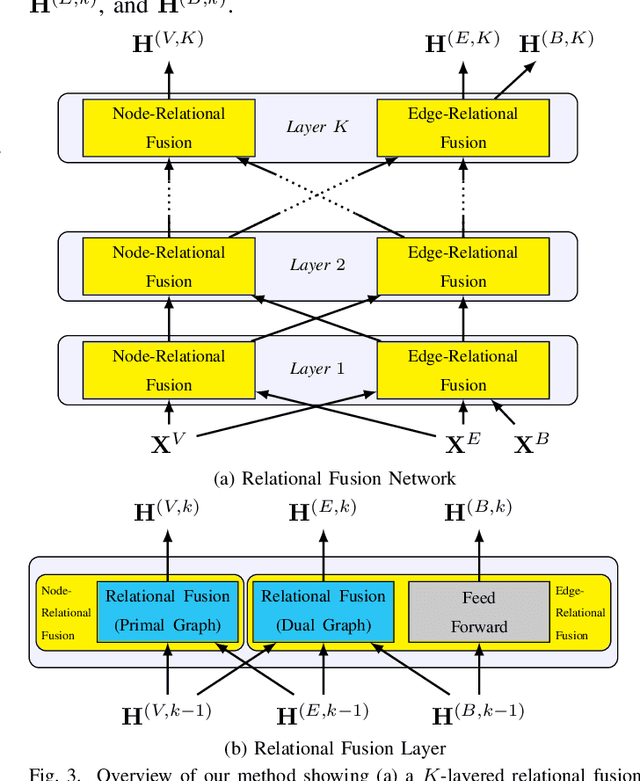
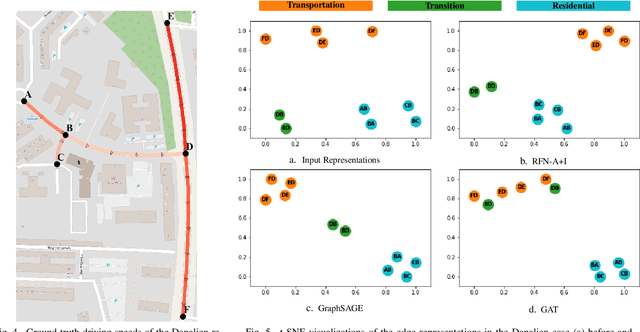
The application of machine learning techniques in the setting of road networks holds the potential to facilitate many important intelligent transportation applications. Graph Convolutional Networks (GCNs) are neural networks that are capable of leveraging the structure of a network. However, many implicit assumptions of GCNs do not apply to road networks. We introduce the Relational Fusion Network (RFN), a novel type of GCN designed specifically for road networks. In particular, we propose methods that substantially outperform state-of-the-art GCNs on two machine learning tasks in road networks. Furthermore, we show that state-of-the-art GCNs may fail to effectively leverage road network structure and may not generalize well to other road networks.
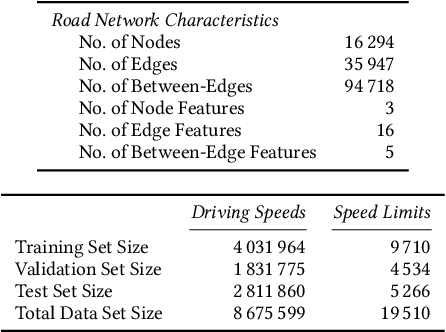
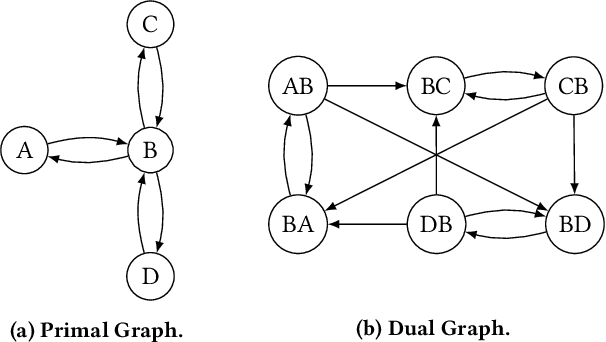
On Network Embedding for Machine Learning on Road Networks: A Case Study on the Danish Road Network
Nov 15, 2019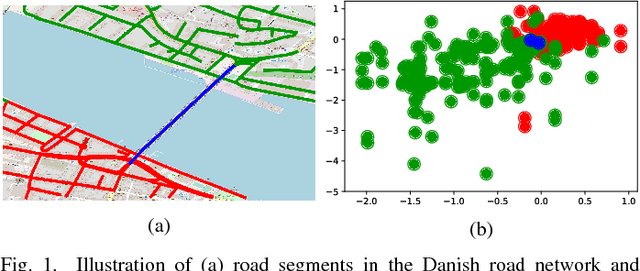
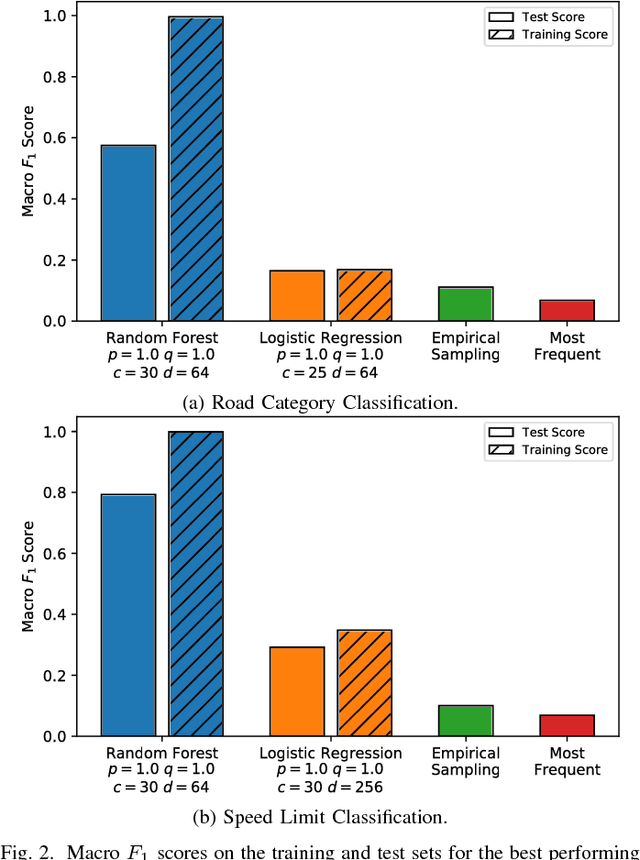
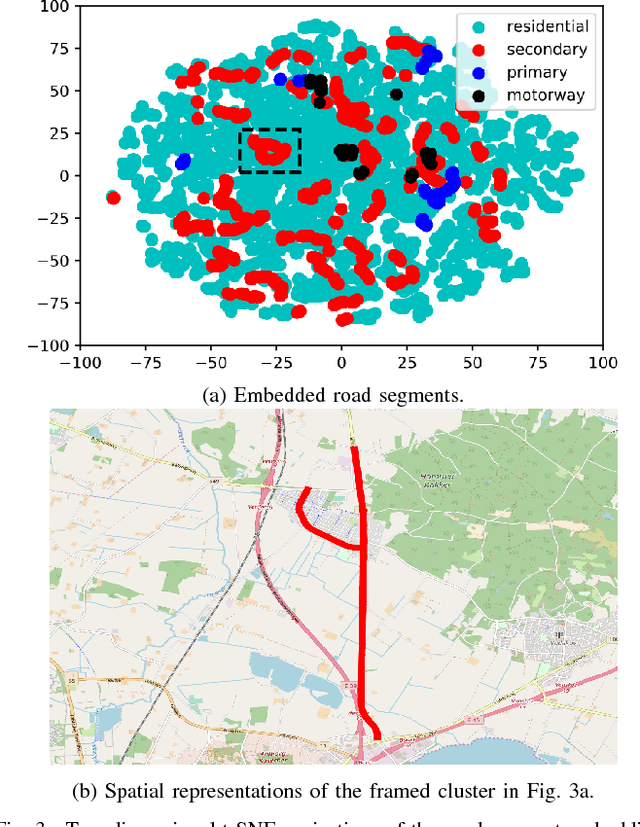
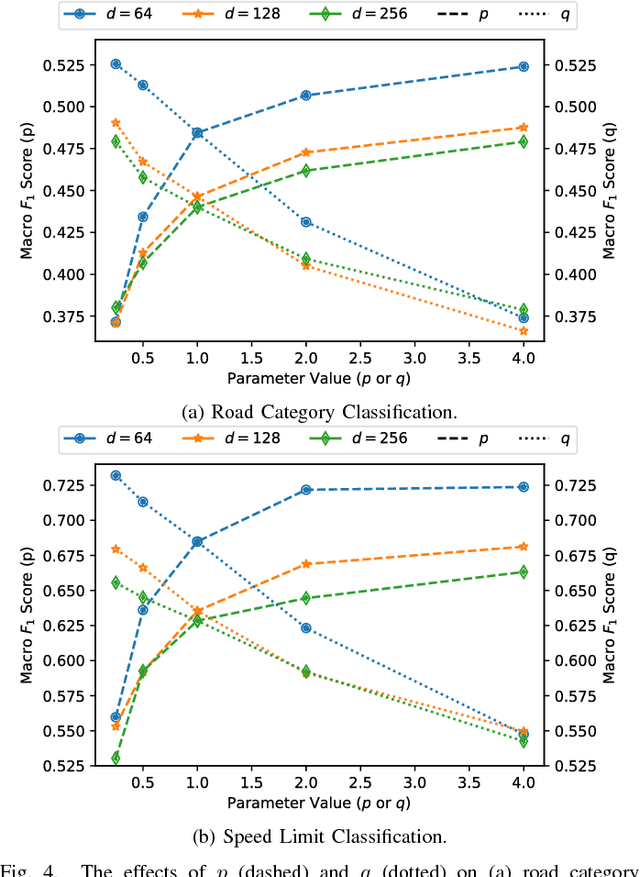
Road networks are a type of spatial network, where edges may be associated with qualitative information such as road type and speed limit. Unfortunately, such information is often incomplete; for instance, OpenStreetMap only has speed limits for 13% of all Danish road segments. This is problematic for analysis tasks that rely on such information for machine learning. To enable machine learning in such circumstances, one may consider the application of network embedding methods to extract structural information from the network. However, these methods have so far mostly been used in the context of social networks, which differ significantly from road networks in terms of, e.g., node degree and level of homophily (which are key to the performance of many network embedding methods). We analyze the use of network embedding methods, specifically node2vec, for learning road segment embeddings in road networks. Due to the often limited availability of information on other relevant road characteristics, the analysis focuses on leveraging the spatial network structure. Our results suggest that network embedding methods can indeed be used for deriving relevant network features (that may, e.g, be used for predicting speed limits), but that the qualities of the embeddings differ from embeddings for social networks.
* Best Paper at the 3rd IEEE International Workshop on Big Spatial Data (BSD 2018)
Graph Convolutional Networks for Road Networks
Aug 30, 2019
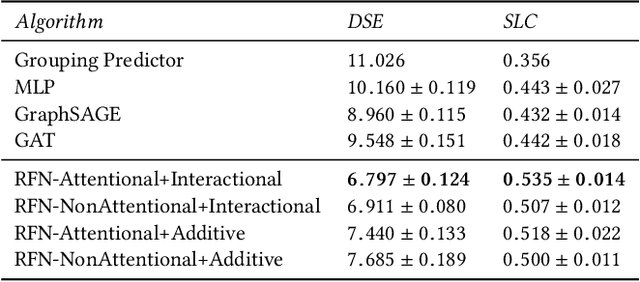
Machine learning techniques for road networks hold the potential to facilitate many important transportation applications. Graph Convolutional Networks (GCNs) are neural networks that are capable of leveraging the structure of a road network by utilizing information of, e.g., adjacent road segments. While state-of-the-art GCNs target node classification tasks in social, citation, and biological networks, machine learning tasks in road networks differ substantially from such tasks. In road networks, prediction tasks concern edges representing road segments, and many tasks involve regression. In addition, road networks differ substantially from the networks assumed in the GCN literature in terms of the attribute information available and the network characteristics. Many implicit assumptions of GCNs do therefore not apply. We introduce the notion of Relational Fusion Network (RFN), a novel type of GCN designed specifically for machine learning on road networks. In particular, we propose methods that outperform state-of-the-art GCNs on both a road segment regression task and a road segment classification task by 32-40% and 21-24%, respectively. In addition, we provide experimental evidence of the short-comings of state-of-the-art GCNs in the context of road networks: unlike our method, they cannot effectively leverage the road network structure for road segment classification and fail to outperform a regular multi-layer perceptron.
Adaptive User-Oriented Direct Load-Control of Residential Flexible Devices
May 09, 2018

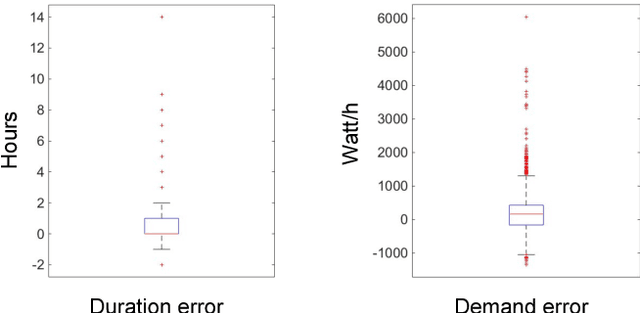
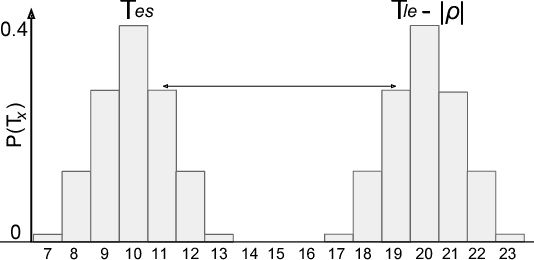
Demand Response (DR) schemes are effective tools to maintain a dynamic balance in energy markets with higher integration of fluctuating renewable energy sources. DR schemes can be used to harness residential devices' flexibility and to utilize it to achieve social and financial objectives. However, existing DR schemes suffer from low user participation as they fail at taking into account the users' requirements. First, DR schemes are highly demanding for the users, as users need to provide direct information, e.g. via surveys, on their energy consumption preferences. Second, the user utility models based on these surveys are hard-coded and do not adapt over time. Third, the existing scheduling techniques require the users to input their energy requirements on a daily basis. As an alternative, this paper proposes a DR scheme for user-oriented direct load-control of residential appliances operations. Instead of relying on user surveys to evaluate the user utility, we propose an online data-driven approach for estimating user utility functions, purely based on available load consumption data, that adaptively models the users' preference over time. Our scheme is based on a day-ahead scheduling technique that transparently prescribes the users with optimal device operation schedules that take into account both financial benefits and user-perceived quality of service. To model day-ahead user energy demand and flexibility, we propose a probabilistic approach for generating flexibility models under uncertainty. Results on both real-world and simulated datasets show that our DR scheme can provide significant financial benefits while preserving the user-perceived quality of service.