 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniTE -- The Best of Both Worlds: Unifying Function-Fitting and Aggregation-Based Approaches to Travel Time and Travel Speed Estimation
Apr 27, 2021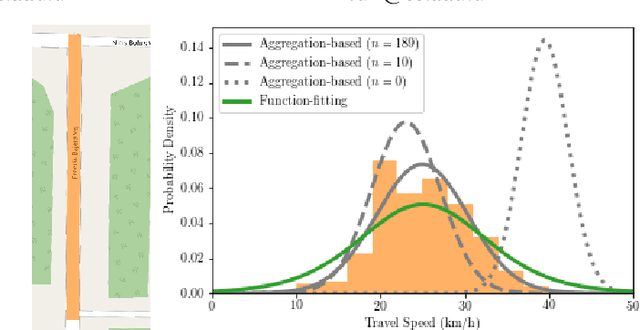
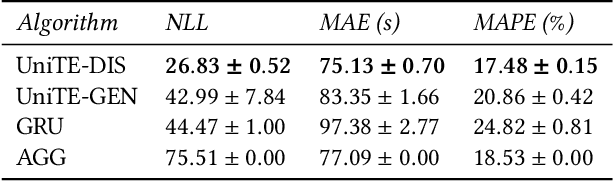
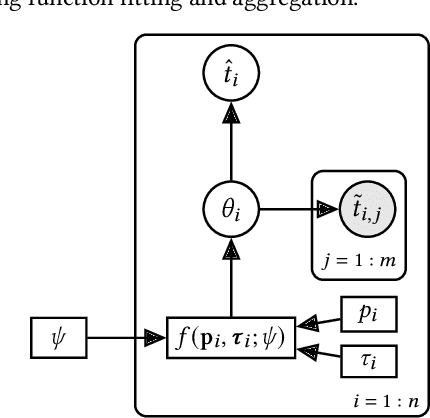
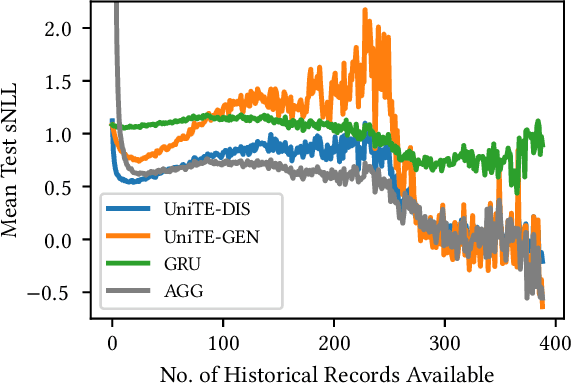
Travel time or speed estimation are part of many intelligent transportation applications. Existing estimation approaches rely on either function fitting or aggregation and represent different trade-offs between generalizability and accuracy. Function-fitting approaches learn functions that map feature vectors of, e.g., routes, to travel time or speed estimates, which enables generalization to unseen routes. However, mapping functions are imperfect and offer poor accuracy in practice. Aggregation-based approaches instead form estimates by aggregating historical data, e.g., traversal data for routes. This enables very high accuracy given sufficient data. However, they rely on simplistic heuristics when insufficient data is available, yielding poor generalizability. We present a Unifying approach to Travel time and speed Estimation (UniTE) that combines function-fitting and aggregation-based approaches into a unified framework that aims to achieve the generalizability of function-fitting approaches and the accuracy of aggregation-based approaches. An empirical study finds that an instance of UniTE can improve the accuracies of travel speed distribution and travel time estimation by $40-64\%$ and $3-23\%$, respectively, compared to using function fitting or aggregation alone
Scalable Unsupervised Multi-Criteria Trajectory Segmentation and Driving Preference Mining
Oct 23, 2020
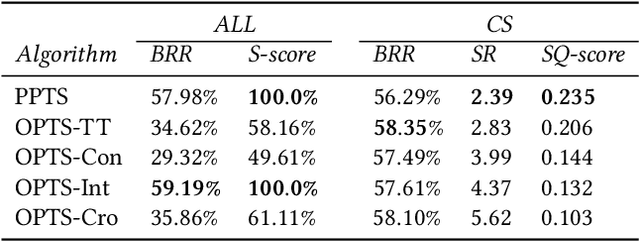
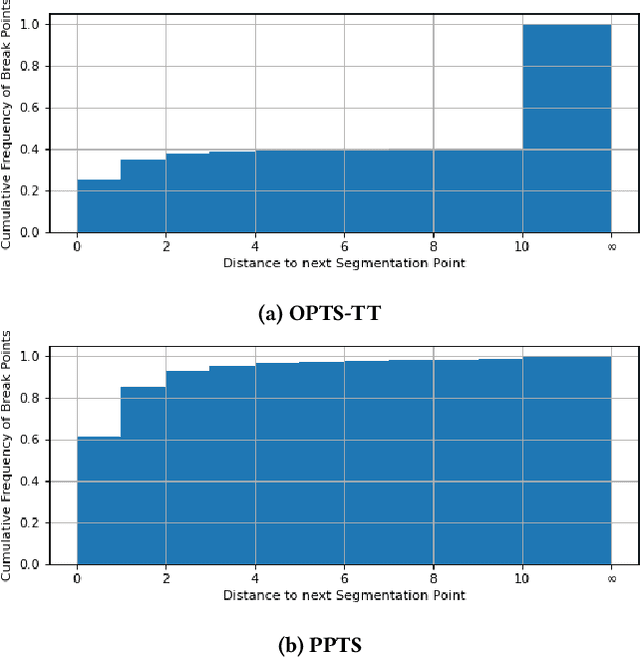
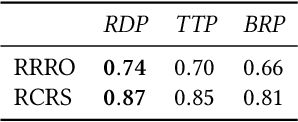
We present analysis techniques for large trajectory data sets that aim to provide a semantic understanding of trajectories reaching beyond them being point sequences in time and space. The presented techniques use a driving preference model w.r.t. road segment traversal costs, e.g., travel time and distance, to analyze and explain trajectories. In particular, we present trajectory mining techniques that can (a) find interesting points within a trajectory indicating, e.g., a via-point, and (b) recover the driving preferences of a driver based on their chosen trajectory. We evaluate our techniques on the tasks of via-point identification and personalized routing using a data set of more than 1 million vehicle trajectories collected throughout Denmark during a 3-year period. Our techniques can be implemented efficiently and are highly parallelizable, allowing them to scale to millions or billions of trajectories.
Relational Fusion Networks: Graph Convolutional Networks for Road Networks
Jun 16, 2020
The application of machine learning techniques in the setting of road networks holds the potential to facilitate many important intelligent transportation applications. Graph Convolutional Networks (GCNs) are neural networks that are capable of leveraging the structure of a network. However, many implicit assumptions of GCNs do not apply to road networks. We introduce the Relational Fusion Network (RFN), a novel type of GCN designed specifically for road networks. In particular, we propose methods that substantially outperform state-of-the-art GCNs on two machine learning tasks in road networks. Furthermore, we show that state-of-the-art GCNs may fail to effectively leverage road network structure and may not generalize well to other road networks.
On Network Embedding for Machine Learning on Road Networks: A Case Study on the Danish Road Network
Nov 15, 2019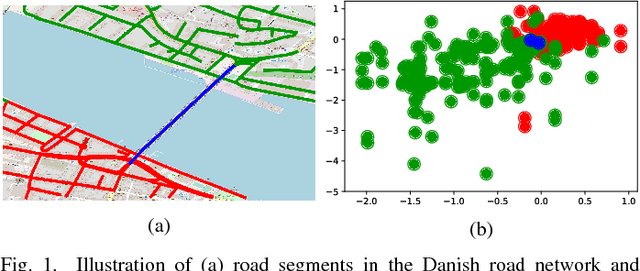
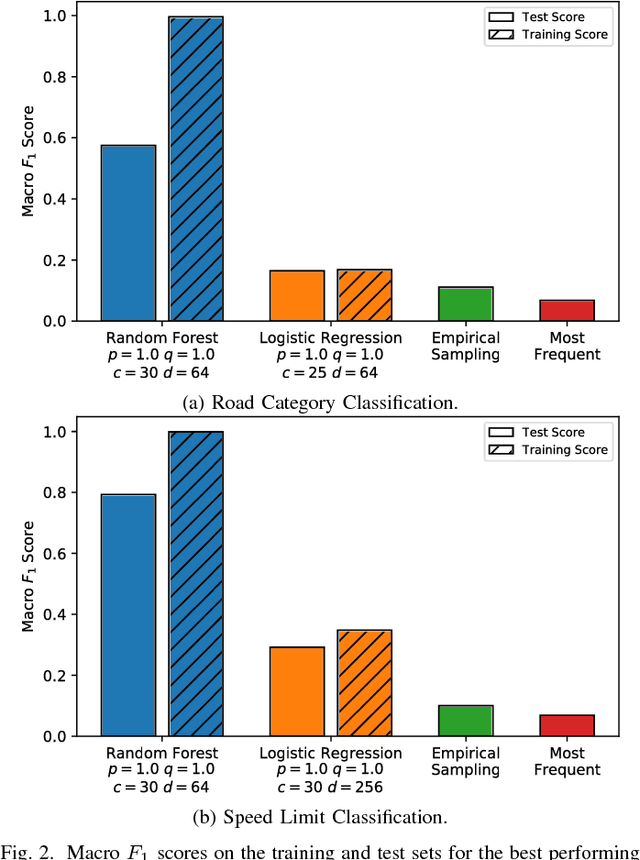
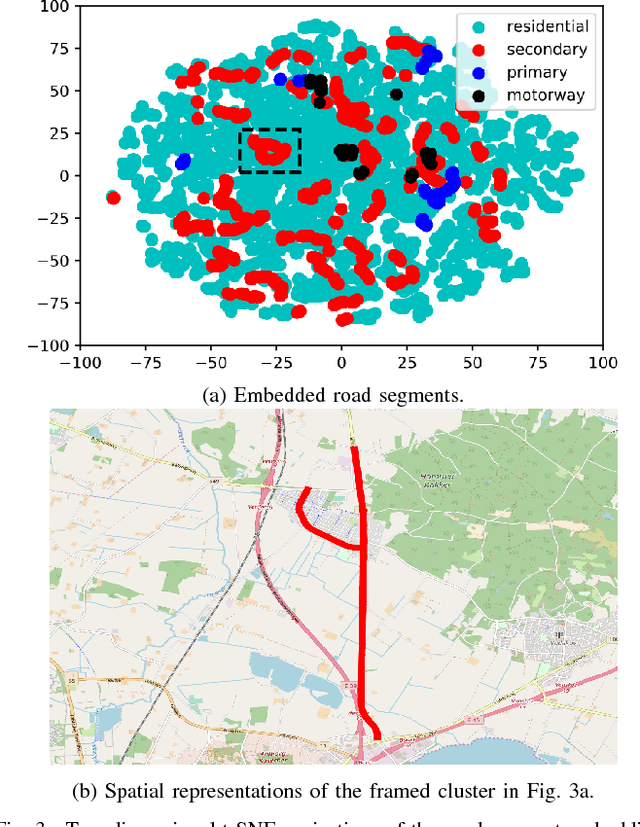
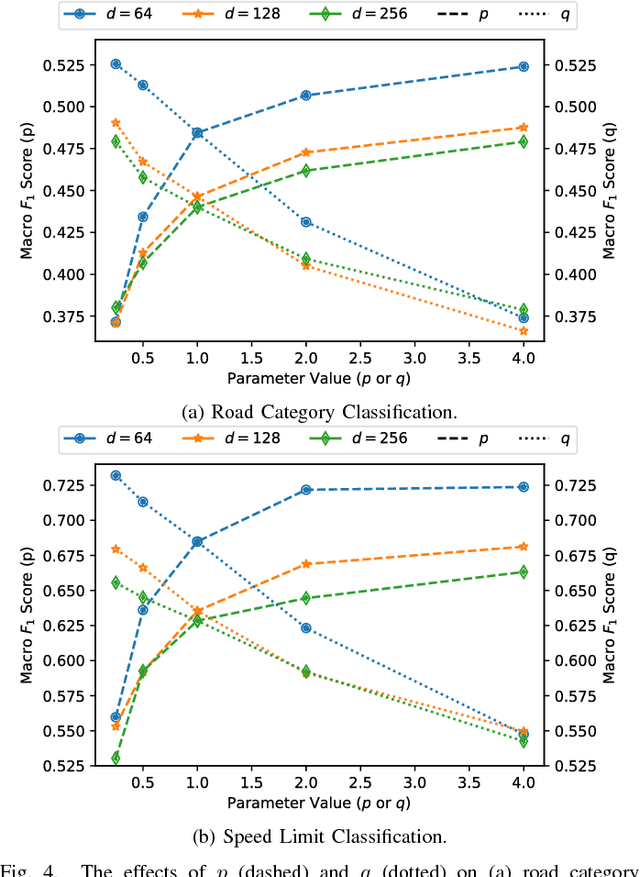
Road networks are a type of spatial network, where edges may be associated with qualitative information such as road type and speed limit. Unfortunately, such information is often incomplete; for instance, OpenStreetMap only has speed limits for 13% of all Danish road segments. This is problematic for analysis tasks that rely on such information for machine learning. To enable machine learning in such circumstances, one may consider the application of network embedding methods to extract structural information from the network. However, these methods have so far mostly been used in the context of social networks, which differ significantly from road networks in terms of, e.g., node degree and level of homophily (which are key to the performance of many network embedding methods). We analyze the use of network embedding methods, specifically node2vec, for learning road segment embeddings in road networks. Due to the often limited availability of information on other relevant road characteristics, the analysis focuses on leveraging the spatial network structure. Our results suggest that network embedding methods can indeed be used for deriving relevant network features (that may, e.g, be used for predicting speed limits), but that the qualities of the embeddings differ from embeddings for social networks.
* Best Paper at the 3rd IEEE International Workshop on Big Spatial Data (BSD 2018)
Graph Convolutional Networks for Road Networks
Aug 30, 2019
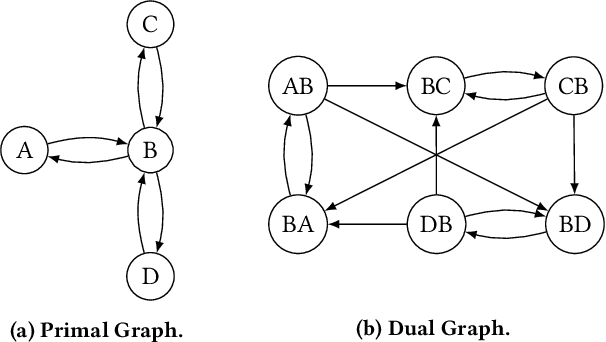
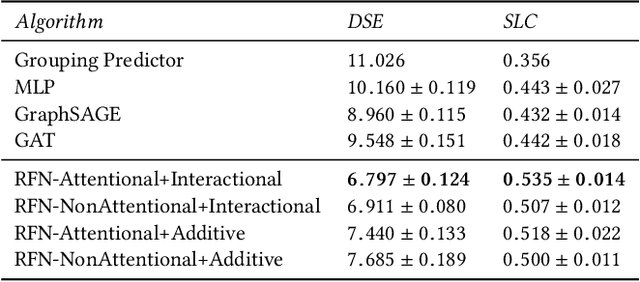
Machine learning techniques for road networks hold the potential to facilitate many important transportation applications. Graph Convolutional Networks (GCNs) are neural networks that are capable of leveraging the structure of a road network by utilizing information of, e.g., adjacent road segments. While state-of-the-art GCNs target node classification tasks in social, citation, and biological networks, machine learning tasks in road networks differ substantially from such tasks. In road networks, prediction tasks concern edges representing road segments, and many tasks involve regression. In addition, road networks differ substantially from the networks assumed in the GCN literature in terms of the attribute information available and the network characteristics. Many implicit assumptions of GCNs do therefore not apply. We introduce the notion of Relational Fusion Network (RFN), a novel type of GCN designed specifically for machine learning on road networks. In particular, we propose methods that outperform state-of-the-art GCNs on both a road segment regression task and a road segment classification task by 32-40% and 21-24%, respectively. In addition, we provide experimental evidence of the short-comings of state-of-the-art GCNs in the context of road networks: unlike our method, they cannot effectively leverage the road network structure for road segment classification and fail to outperform a regular multi-layer perceptron.