 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Convolutional Networks for Road Networks
Paper and Code
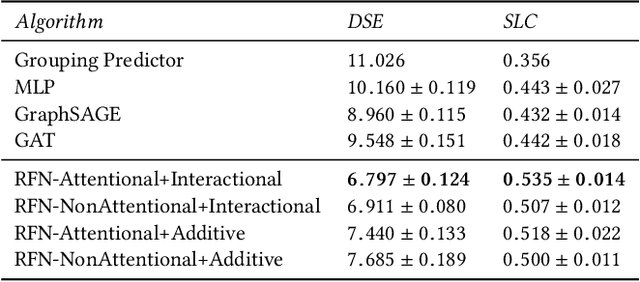
Machine learning techniques for road networks hold the potential to facilitate many important transportation applications. Graph Convolutional Networks (GCNs) are neural networks that are capable of leveraging the structure of a road network by utilizing information of, e.g., adjacent road segments. While state-of-the-art GCNs target node classification tasks in social, citation, and biological networks, machine learning tasks in road networks differ substantially from such tasks. In road networks, prediction tasks concern edges representing road segments, and many tasks involve regression. In addition, road networks differ substantially from the networks assumed in the GCN literature in terms of the attribute information available and the network characteristics. Many implicit assumptions of GCNs do therefore not apply. We introduce the notion of Relational Fusion Network (RFN), a novel type of GCN designed specifically for machine learning on road networks. In particular, we propose methods that outperform state-of-the-art GCNs on both a road segment regression task and a road segment classification task by 32-40% and 21-24%, respectively. In addition, we provide experimental evidence of the short-comings of state-of-the-art GCNs in the context of road networks: unlike our method, they cannot effectively leverage the road network structure for road segment classification and fail to outperform a regular multi-layer perceptron.