 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Frame and Event-Based Simulator and Event-Based Video Interpolation Network
Dec 17, 2021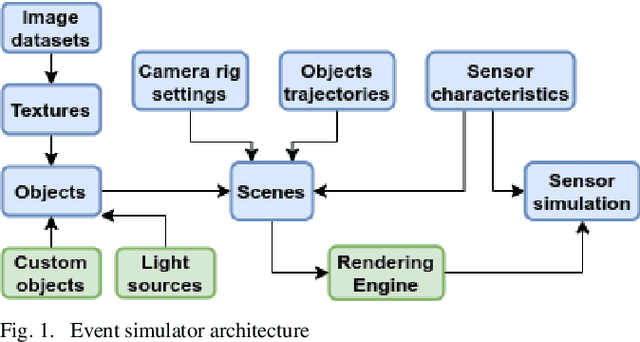
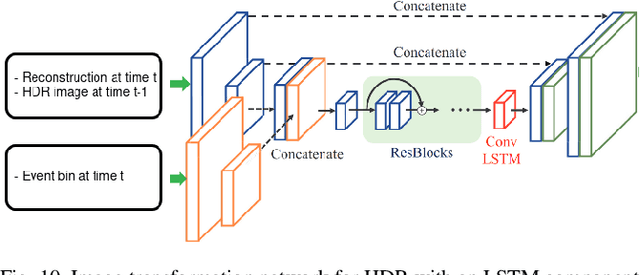
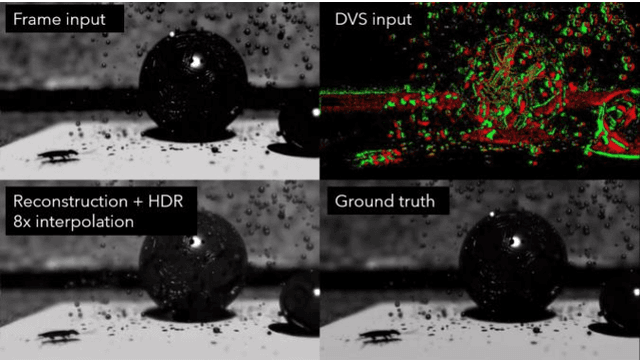
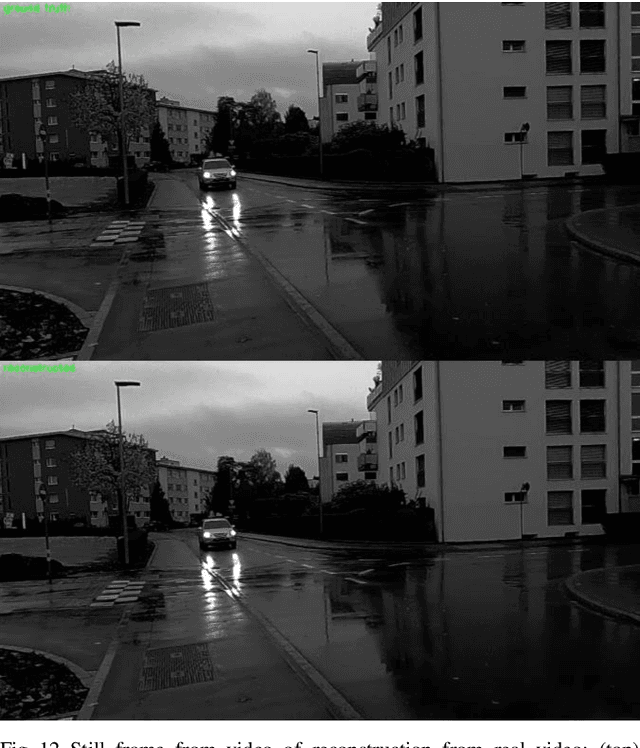
Fast neuromorphic event-based vision sensors (Dynamic Vision Sensor, DVS) can be combined with slower conventional frame-based sensors to enable higher-quality inter-frame interpolation than traditional methods relying on fixed motion approximations using e.g. optical flow. In this work we present a new, advanced event simulator that can produce realistic scenes recorded by a camera rig with an arbitrary number of sensors located at fixed offsets. It includes a new configurable frame-based image sensor model with realistic image quality reduction effects, and an extended DVS model with more accurate characteristics. We use our simulator to train a novel reconstruction model designed for end-to-end reconstruction of high-fps video. Unlike previously published methods, our method does not require the frame and DVS cameras to have the same optics, positions, or camera resolutions. It is also not limited to objects a fixed distance from the sensor. We show that data generated by our simulator can be used to train our new model, leading to reconstructed images on public datasets of equivalent or better quality than the state of the art. We also show our sensor generalizing to data recorded by real sensors.
Navigating the Landscape for Real-time Localisation and Mapping for Robotics and Virtual and Augmented Reality
Aug 20, 2018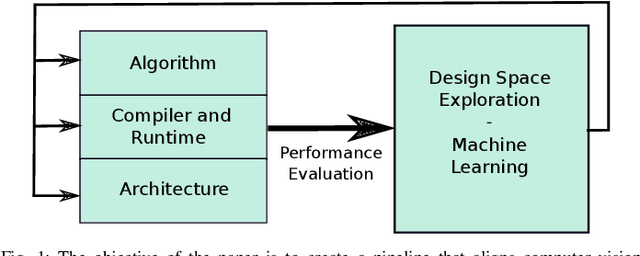

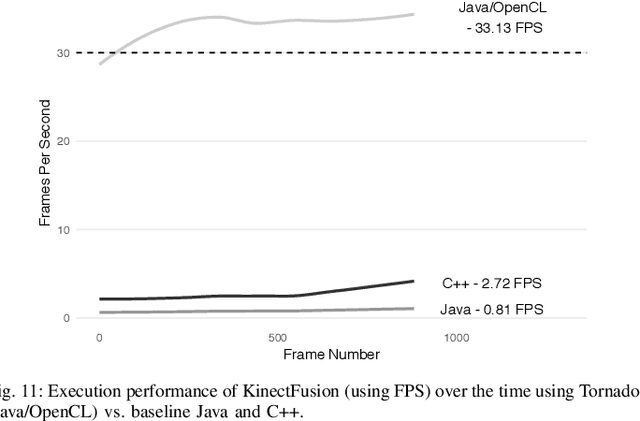
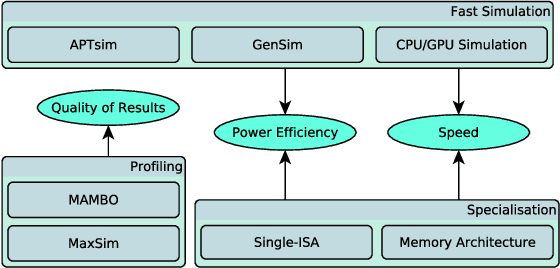
Visual understanding of 3D environments in real-time, at low power, is a huge computational challenge. Often referred to as SLAM (Simultaneous Localisation and Mapping), it is central to applications spanning domestic and industrial robotics, autonomous vehicles, virtual and augmented reality. This paper describes the results of a major research effort to assemble the algorithms, architectures, tools, and systems software needed to enable delivery of SLAM, by supporting applications specialists in selecting and configuring the appropriate algorithm and the appropriate hardware, and compilation pathway, to meet their performance, accuracy, and energy consumption goals. The major contributions we present are (1) tools and methodology for systematic quantitative evaluation of SLAM algorithms, (2) automated, machine-learning-guided exploration of the algorithmic and implementation design space with respect to multiple objectives, (3) end-to-end simulation tools to enable optimisation of heterogeneous, accelerated architectures for the specific algorithmic requirements of the various SLAM algorithmic approaches, and (4) tools for delivering, where appropriate, accelerated, adaptive SLAM solutions in a managed, JIT-compiled, adaptive runtime context.