 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-shot Sound Event Classification Using a Sound Attribute Vector with Global and Local Feature Learning
Mar 18, 2023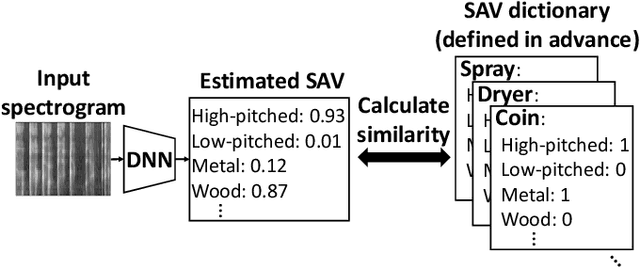
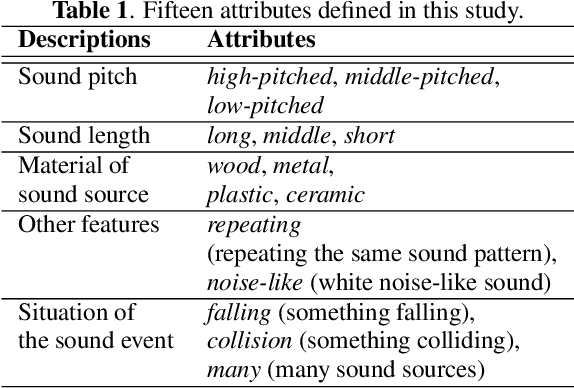
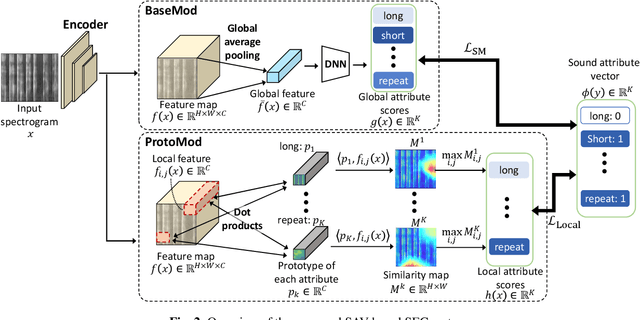
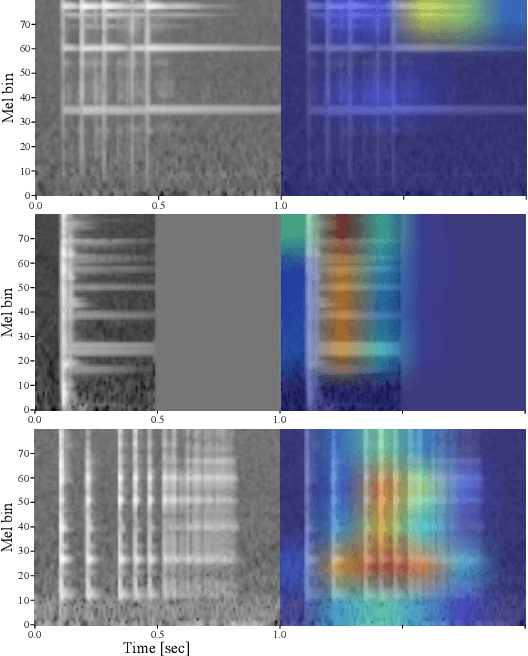
This paper introduces a zero-shot sound event classification (ZS-SEC) method to identify sound events that have never occurred in training data. In our previous work, we proposed a ZS-SEC method using sound attribute vectors (SAVs), where a deep neural network model infers attribute information that describes the sound of an event class instead of inferring its class label directly. Our previous method showed that it could classify unseen events to some extent; however, the accuracy for unseen events was far inferior to that for seen events. In this paper, we propose a new ZS-SEC method that can learn discriminative global features and local features simultaneously to enhance SAV-based ZS-SEC. In the proposed method, while the global features are learned in order to discriminate the event classes in the training data, the spectro-temporal local features are learned in order to regress the attribute information using attribute prototypes. The experimental results show that our proposed method can improve the accuracy of SAV-based ZS-SEC and can visualize the region in the spectrogram related to each attribute.
Learn to See Faster: Pushing the Limits of High-Speed Camera with Deep Underexposed Image Denoising
Nov 29, 2022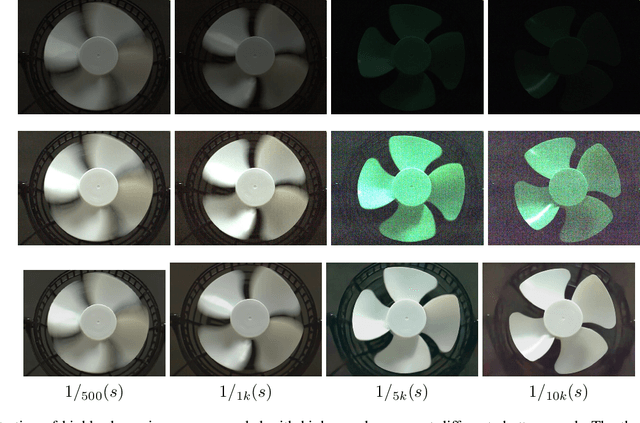
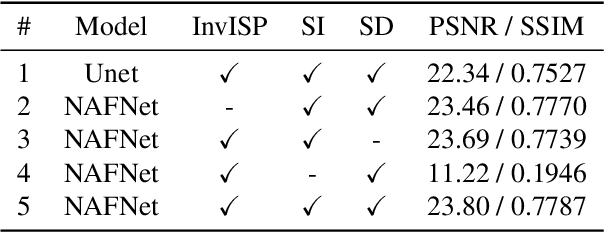
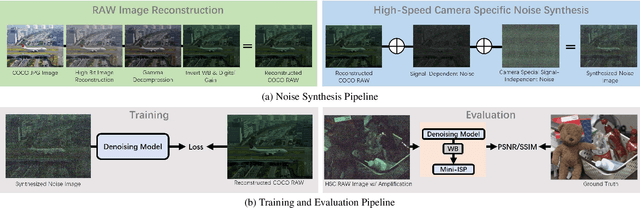
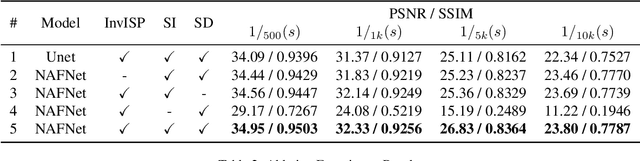
The ability to record high-fidelity videos at high acquisition rates is central to the study of fast moving phenomena. The difficulty of imaging fast moving scenes lies in a trade-off between motion blur and underexposure noise: On the one hand, recordings with long exposure times suffer from motion blur effects caused by movements in the recorded scene. On the other hand, the amount of light reaching camera photosensors decreases with exposure times so that short-exposure recordings suffer from underexposure noise. In this paper, we propose to address this trade-off by treating the problem of high-speed imaging as an underexposed image denoising problem. We combine recent advances on underexposed image denoising using deep learning and adapt these methods to the specificity of the high-speed imaging problem. Leveraging large external datasets with a sensor-specific noise model, our method is able to speedup the acquisition rate of a High-Speed Camera over one order of magnitude while maintaining similar image quality.
Optical Flow Regularization of Implicit Neural Representations for Video Frame Interpolation
Jun 22, 2022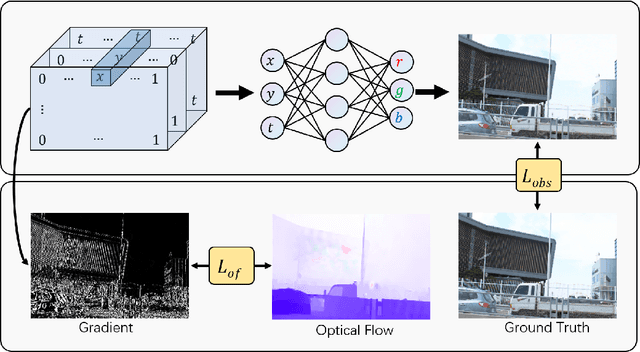
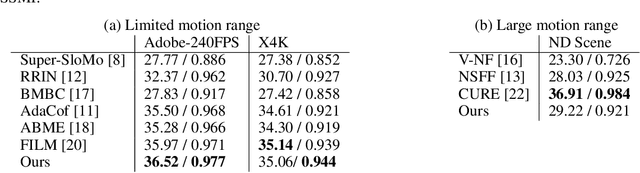
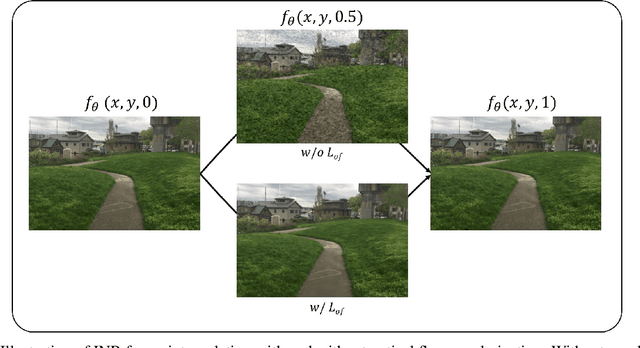
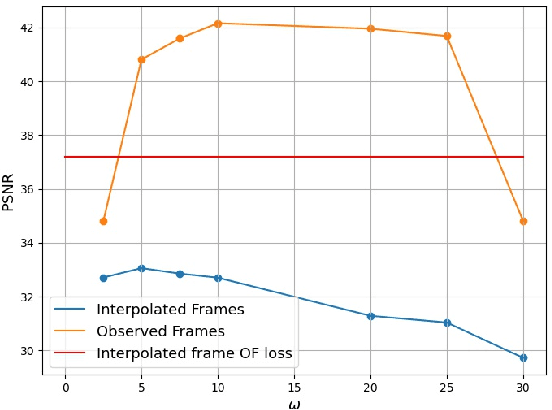
Recent works have shown the ability of Implicit Neural Representations (INR) to carry meaningful representations of signal derivatives. In this work, we leverage this property to perform Video Frame Interpolation (VFI) by explicitly constraining the derivatives of the INR to satisfy the optical flow constraint equation. We achieve state of the art VFI on limited motion ranges using only a target video and its optical flow, without learning the interpolation operator from additional training data. We further show that constraining the INR derivatives not only allows to better interpolate intermediate frames but also improves the ability of narrow networks to fit the observed frames, which suggests potential applications to video compression and INR optimization.
Current Source Localization Using Deep Prior with Depth Weighting
Mar 26, 2022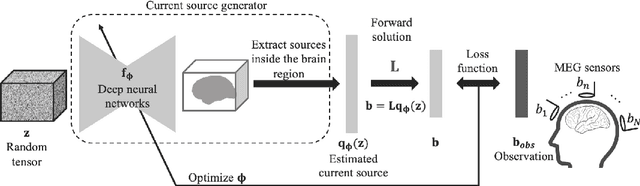
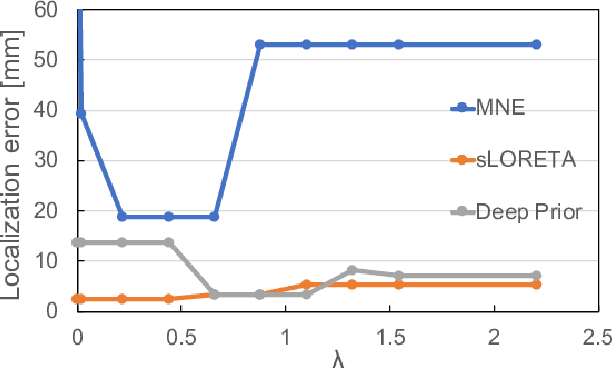
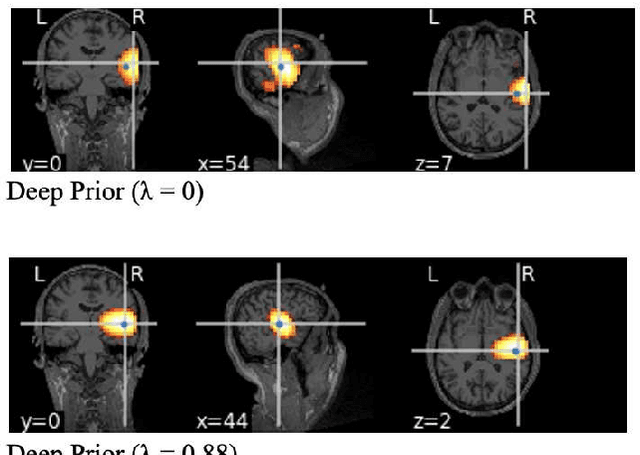
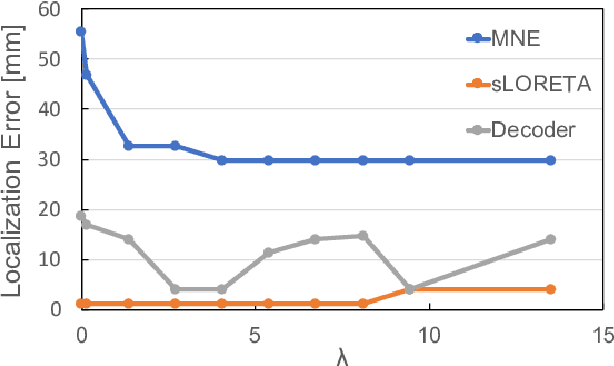
This paper proposes a novel neuronal current source localization method based on Deep Prior that represents a more complicated prior distribution of current source using convolutional networks. Deep Prior has been suggested as a means of an unsupervised learning approach that does not require learning using training data, and randomly-initialized neural networks are used to update a source location using a single observation. In our previous work, a Deep-Prior-based current source localization method in the brain has been proposed but the performance was not almost the same as those of conventional approaches, such as sLORETA. In order to improve the Deep-Prior-based approach, in this paper, a depth weight of the current source is introduced for Deep Prior, where depth weighting amounts to assigning more penalty to the superficial currents. Its effectiveness is confirmed by experiments of current source estimation on simulated MEG data.
FasterRCNN Monitoring of Road Damages: Competition and Deployment
Oct 22, 2020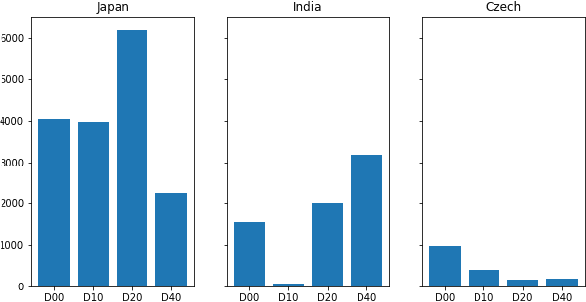
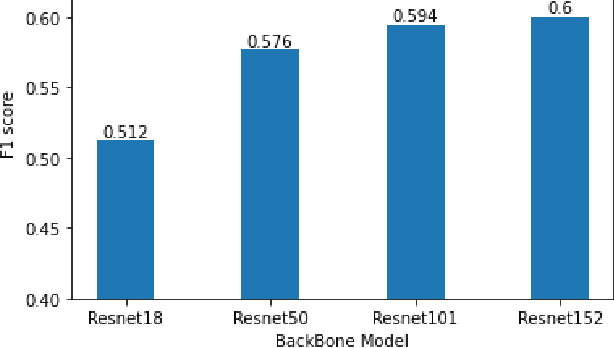
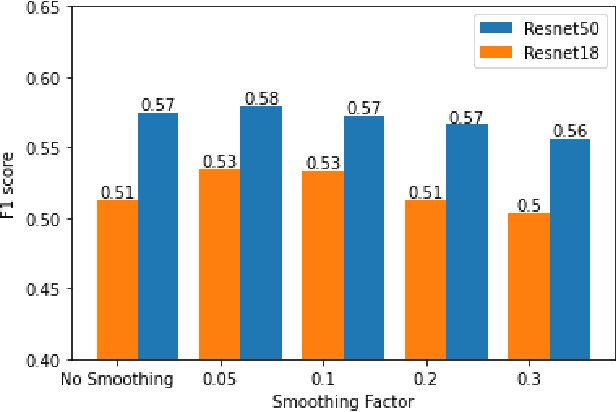
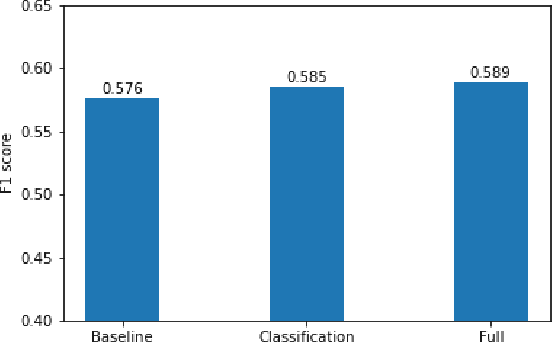
Maintaining aging infrastructure is a challenge currently faced by local and national administrators all around the world. An important prerequisite for efficient infrastructure maintenance is to continuously monitor (i.e., quantify the level of safety and reliability) the state of very large structures. Meanwhile, computer vision has made impressive strides in recent years, mainly due to successful applications of deep learning models. These novel progresses are allowing the automation of vision tasks, which were previously impossible to automate, offering promising possibilities to assist administrators in optimizing their infrastructure maintenance operations. In this context, the IEEE 2020 global Road Damage Detection (RDD) Challenge is giving an opportunity for deep learning and computer vision researchers to get involved and help accurately track pavement damages on road networks. This paper proposes two contributions to that topic: In a first part, we detail our solution to the RDD Challenge. In a second part, we present our efforts in deploying our model on a local road network, explaining the proposed methodology and encountered challenges.
Reversible designs for extreme memory cost reduction of CNN training
Oct 24, 2019
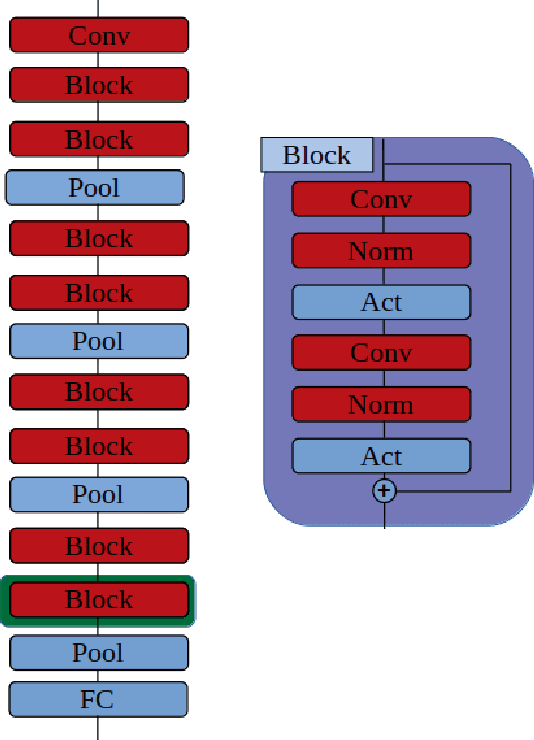
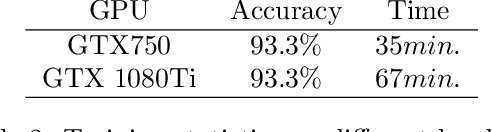
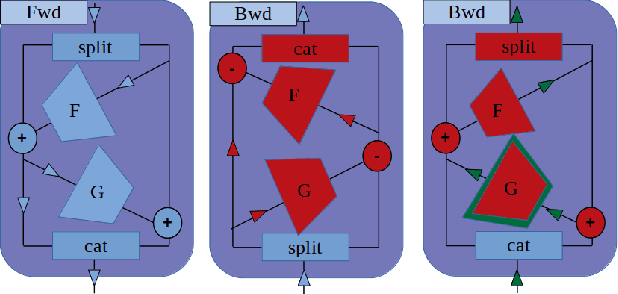
Training Convolutional Neural Networks (CNN) is a resource intensive task that requires specialized hardware for efficient computation. One of the most limiting bottleneck of CNN training is the memory cost associated with storing the activation values of hidden layers needed for the computation of the weights gradient during the backward pass of the backpropagation algorithm. Recently, reversible architectures have been proposed to reduce the memory cost of training large CNN by reconstructing the input activation values of hidden layers from their output during the backward pass, circumventing the need to accumulate these activations in memory during the forward pass. In this paper, we push this idea to the extreme and analyze reversible network designs yielding minimal training memory footprint. We investigate the propagation of numerical errors in long chains of invertible operations and analyze their effect on training. We introduce the notion of pixel-wise memory cost to characterize the memory footprint of model training, and propose a new model architecture able to efficiently train arbitrarily deep neural networks with a minimum memory cost of 352 bytes per input pixel. This new kind of architecture enables training large neural networks on very limited memory, opening the door for neural network training on embedded devices or non-specialized hardware. For instance, we demonstrate training of our model to 93.3% accuracy on the CIFAR10 dataset within 67 minutes on a low-end Nvidia GTX750 GPU with only 1GB of memory.
On zero-shot recognition of generic objects
Apr 10, 2019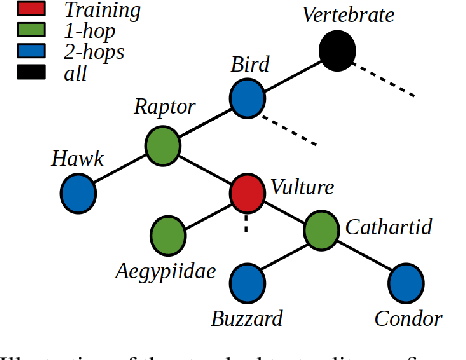
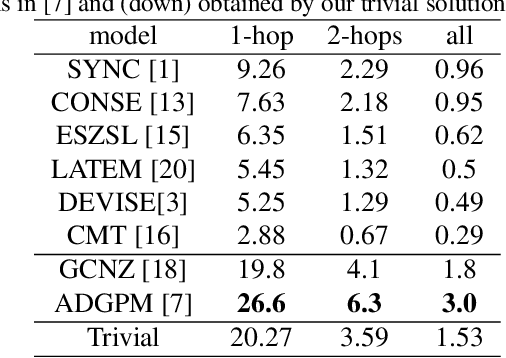
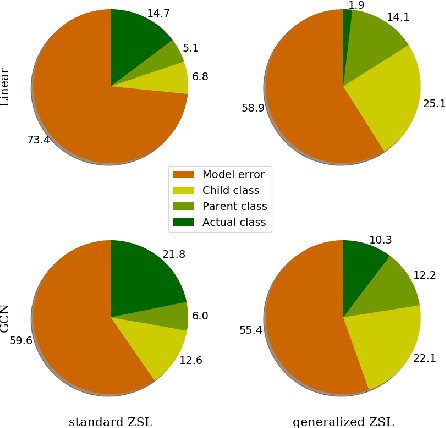
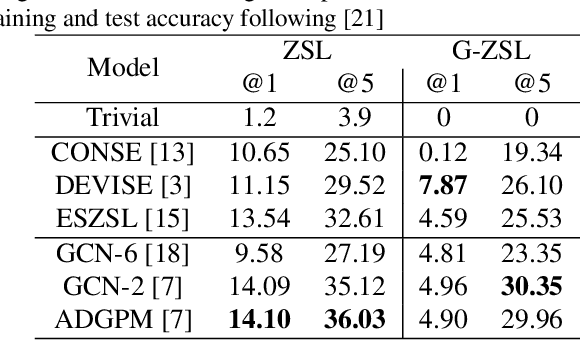
Many recent advances in computer vision are the result of a healthy competition among researchers on high quality, task-specific, benchmarks. After a decade of active research, zero-shot learning (ZSL) models accuracy on the Imagenet benchmark remains far too low to be considered for practical object recognition applications. In this paper, we argue that the main reason behind this apparent lack of progress is the poor quality of this benchmark. We highlight major structural flaws of the current benchmark and analyze different factors impacting the accuracy of ZSL models. We show that the actual classification accuracy of existing ZSL models is significantly higher than was previously thought as we account for these flaws. We then introduce the notion of structural bias specific to ZSL datasets. We discuss how the presence of this new form of bias allows for a trivial solution to the standard benchmark and conclude on the need for a new benchmark. We then detail the semi-automated construction of a new benchmark to address these flaws.