 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Perform Physics Experiments via Deep Reinforcement Learning
Aug 17, 2017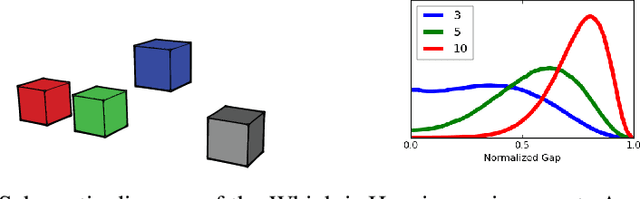
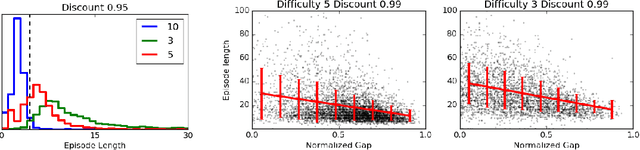
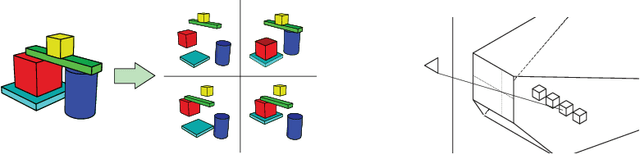
When encountering novel objects, humans are able to infer a wide range of physical properties such as mass, friction and deformability by interacting with them in a goal driven way. This process of active interaction is in the same spirit as a scientist performing experiments to discover hidden facts. Recent advances in artificial intelligence have yielded machines that can achieve superhuman performance in Go, Atari, natural language processing, and complex control problems; however, it is not clear that these systems can rival the scientific intuition of even a young child. In this work we introduce a basic set of tasks that require agents to estimate properties such as mass and cohesion of objects in an interactive simulated environment where they can manipulate the objects and observe the consequences. We found that state of art deep reinforcement learning methods can learn to perform the experiments necessary to discover such hidden properties. By systematically manipulating the problem difficulty and the cost incurred by the agent for performing experiments, we found that agents learn different strategies that balance the cost of gathering information against the cost of making mistakes in different situations.
Variational Particle Approximations
Dec 06, 2015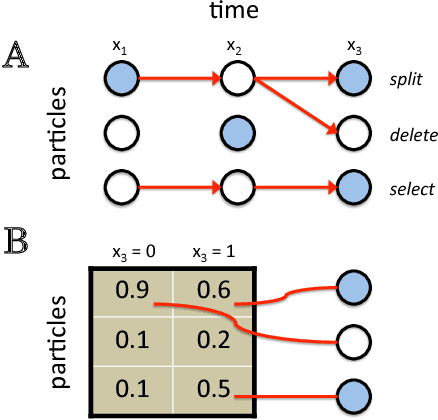
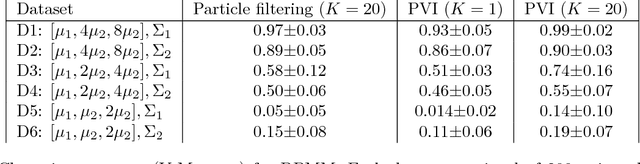
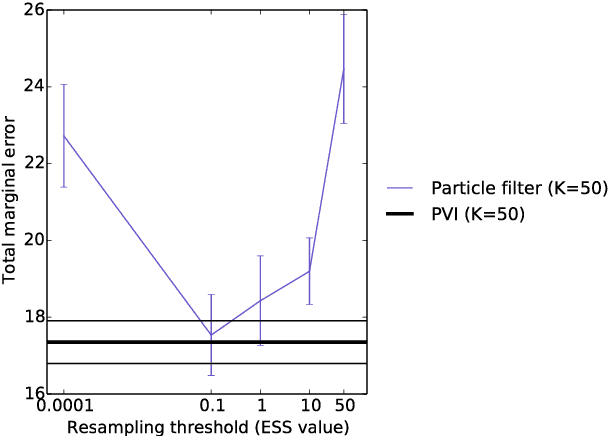

Approximate inference in high-dimensional, discrete probabilistic models is a central problem in computational statistics and machine learning. This paper describes discrete particle variational inference (DPVI), a new approach that combines key strengths of Monte Carlo, variational and search-based techniques. DPVI is based on a novel family of particle-based variational approximations that can be fit using simple, fast, deterministic search techniques. Like Monte Carlo, DPVI can handle multiple modes, and yields exact results in a well-defined limit. Like unstructured mean-field, DPVI is based on optimizing a lower bound on the partition function; when this quantity is not of intrinsic interest, it facilitates convergence assessment and debugging. Like both Monte Carlo and combinatorial search, DPVI can take advantage of factorization, sequential structure, and custom search operators. This paper defines DPVI particle-based approximation family and partition function lower bounds, along with the sequential DPVI and local DPVI algorithm templates for optimizing them. DPVI is illustrated and evaluated via experiments on lattice Markov Random Fields, nonparametric Bayesian mixtures and block-models, and parametric as well as non-parametric hidden Markov models. Results include applications to real-world spike-sorting and relational modeling problems, and show that DPVI can offer appealing time/accuracy trade-offs as compared to multiple alternatives.