 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonoFusion: Sparse-View 4D Reconstruction via Monocular Fusion
Jul 31, 2025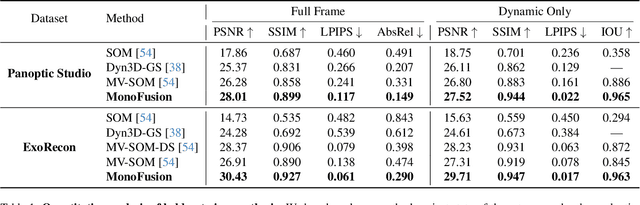
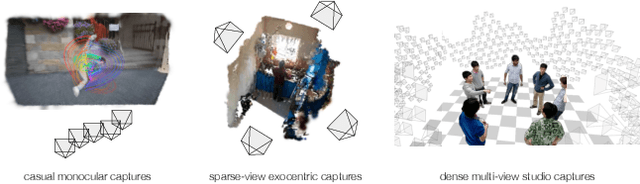
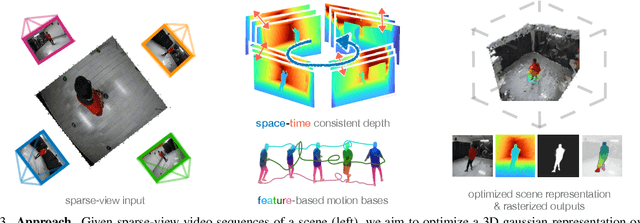
We address the problem of dynamic scene reconstruction from sparse-view videos. Prior work often requires dense multi-view captures with hundreds of calibrated cameras (e.g. Panoptic Studio). Such multi-view setups are prohibitively expensive to build and cannot capture diverse scenes in-the-wild. In contrast, we aim to reconstruct dynamic human behaviors, such as repairing a bike or dancing, from a small set of sparse-view cameras with complete scene coverage (e.g. four equidistant inward-facing static cameras). We find that dense multi-view reconstruction methods struggle to adapt to this sparse-view setup due to limited overlap between viewpoints. To address these limitations, we carefully align independent monocular reconstructions of each camera to produce time- and view-consistent dynamic scene reconstructions. Extensive experiments on PanopticStudio and Ego-Exo4D demonstrate that our method achieves higher quality reconstructions than prior art, particularly when rendering novel views. Code, data, and data-processing scripts are available on https://github.com/ImNotPrepared/MonoFusion.
Using Diffusion Priors for Video Amodal Segmentation
Dec 05, 2024



Object permanence in humans is a fundamental cue that helps in understanding persistence of objects, even when they are fully occluded in the scene. Present day methods in object segmentation do not account for this amodal nature of the world, and only work for segmentation of visible or modal objects. Few amodal methods exist; single-image segmentation methods cannot handle high-levels of occlusions which are better inferred using temporal information, and multi-frame methods have focused solely on segmenting rigid objects. To this end, we propose to tackle video amodal segmentation by formulating it as a conditional generation task, capitalizing on the foundational knowledge in video generative models. Our method is simple; we repurpose these models to condition on a sequence of modal mask frames of an object along with contextual pseudo-depth maps, to learn which object boundary may be occluded and therefore, extended to hallucinate the complete extent of an object. This is followed by a content completion stage which is able to inpaint the occluded regions of an object. We benchmark our approach alongside a wide array of state-of-the-art methods on four datasets and show a dramatic improvement of upto 13% for amodal segmentation in an object's occluded region.
Predicting Long-horizon Futures by Conditioning on Geometry and Time
Apr 17, 2024Our work explores the task of generating future sensor observations conditioned on the past. We are motivated by `predictive coding' concepts from neuroscience as well as robotic applications such as self-driving vehicles. Predictive video modeling is challenging because the future may be multi-modal and learning at scale remains computationally expensive for video processing. To address both challenges, our key insight is to leverage the large-scale pretraining of image diffusion models which can handle multi-modality. We repurpose image models for video prediction by conditioning on new frame timestamps. Such models can be trained with videos of both static and dynamic scenes. To allow them to be trained with modestly-sized datasets, we introduce invariances by factoring out illumination and texture by forcing the model to predict (pseudo) depth, readily obtained for in-the-wild videos via off-the-shelf monocular depth networks. In fact, we show that simply modifying networks to predict grayscale pixels already improves the accuracy of video prediction. Given the extra controllability with timestamp conditioning, we propose sampling schedules that work better than the traditional autoregressive and hierarchical sampling strategies. Motivated by probabilistic metrics from the object forecasting literature, we create a benchmark for video prediction on a diverse set of videos spanning indoor and outdoor scenes and a large vocabulary of objects. Our experiments illustrate the effectiveness of learning to condition on timestamps, and show the importance of predicting the future with invariant modalities.
Tracking Any Object Amodally
Dec 19, 2023



Amodal perception, the ability to comprehend complete object structures from partial visibility, is a fundamental skill, even for infants. Its significance extends to applications like autonomous driving, where a clear understanding of heavily occluded objects is essential. However, modern detection and tracking algorithms often overlook this critical capability, perhaps due to the prevalence of modal annotations in most datasets. To address the scarcity of amodal data, we introduce the TAO-Amodal benchmark, featuring 880 diverse categories in thousands of video sequences. Our dataset includes amodal and modal bounding boxes for visible and occluded objects, including objects that are partially out-of-frame. To enhance amodal tracking with object permanence, we leverage a lightweight plug-in module, the amodal expander, to transform standard, modal trackers into amodal ones through fine-tuning on a few hundred video sequences with data augmentation. We achieve a 3.3\% and 1.6\% improvement on the detection and tracking of occluded objects on TAO-Amodal. When evaluated on people, our method produces dramatic improvements of 2x compared to state-of-the-art modal baselines.
Point Cloud Forecasting as a Proxy for 4D Occupancy Forecasting
Mar 01, 2023Predicting how the world can evolve in the future is crucial for motion planning in autonomous systems. Classical methods are limited because they rely on costly human annotations in the form of semantic class labels, bounding boxes, and tracks or HD maps of cities to plan their motion and thus are difficult to scale to large unlabeled datasets. One promising self-supervised task is 3D point cloud forecasting from unannotated LiDAR sequences. We show that this task requires algorithms to implicitly capture (1) sensor extrinsics (i.e., the egomotion of the autonomous vehicle), (2) sensor intrinsics (i.e., the sampling pattern specific to the particular LiDAR sensor), and (3) the shape and motion of other objects in the scene. But autonomous systems should make predictions about the world and not their sensors. To this end, we factor out (1) and (2) by recasting the task as one of spacetime (4D) occupancy forecasting. But because it is expensive to obtain ground-truth 4D occupancy, we render point cloud data from 4D occupancy predictions given sensor extrinsics and intrinsics, allowing one to train and test occupancy algorithms with unannotated LiDAR sequences. This also allows one to evaluate and compare point cloud forecasting algorithms across diverse datasets, sensors, and vehicles.
Dfferentiable Raycasting for Self-supervised Occupancy Forecasting
Oct 04, 2022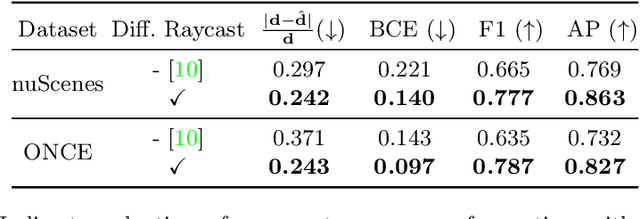

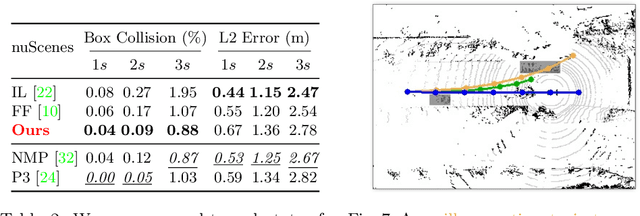
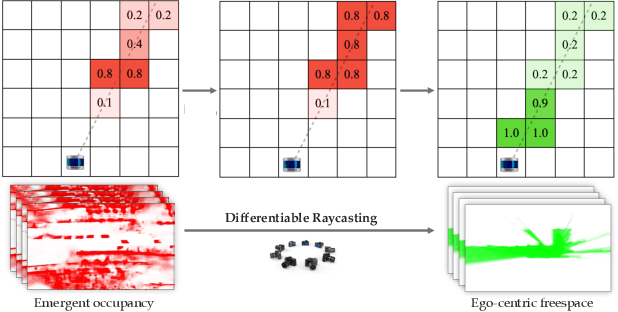
Motion planning for safe autonomous driving requires learning how the environment around an ego-vehicle evolves with time. Ego-centric perception of driveable regions in a scene not only changes with the motion of actors in the environment, but also with the movement of the ego-vehicle itself. Self-supervised representations proposed for large-scale planning, such as ego-centric freespace, confound these two motions, making the representation difficult to use for downstream motion planners. In this paper, we use geometric occupancy as a natural alternative to view-dependent representations such as freespace. Occupancy maps naturally disentangle the motion of the environment from the motion of the ego-vehicle. However, one cannot directly observe the full 3D occupancy of a scene (due to occlusion), making it difficult to use as a signal for learning. Our key insight is to use differentiable raycasting to "render" future occupancy predictions into future LiDAR sweep predictions, which can be compared with ground-truth sweeps for self-supervised learning. The use of differentiable raycasting allows occupancy to emerge as an internal representation within the forecasting network. In the absence of groundtruth occupancy, we quantitatively evaluate the forecasting of raycasted LiDAR sweeps and show improvements of upto 15 F1 points. For downstream motion planners, where emergent occupancy can be directly used to guide non-driveable regions, this representation relatively reduces the number of collisions with objects by up to 17% as compared to freespace-centric motion planners.
BURST: A Benchmark for Unifying Object Recognition, Segmentation and Tracking in Video
Sep 25, 2022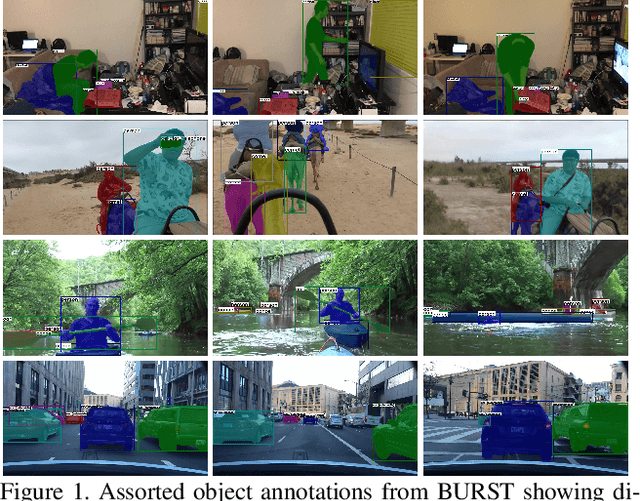
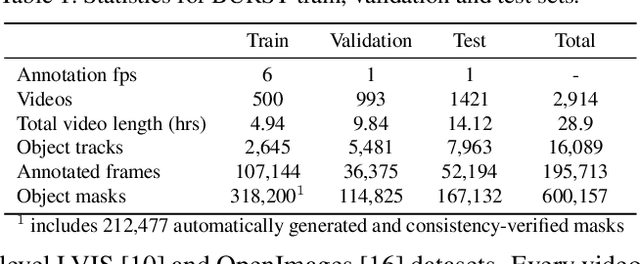
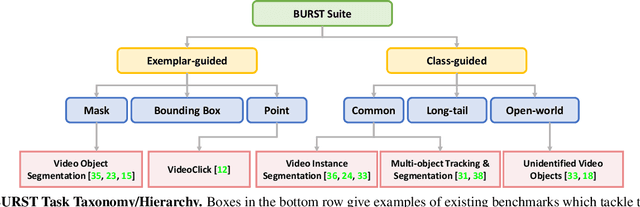
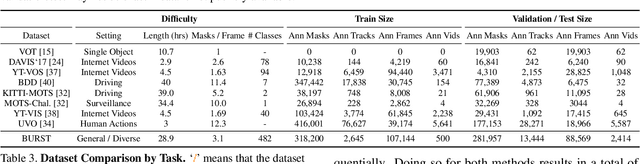
Multiple existing benchmarks involve tracking and segmenting objects in video e.g., Video Object Segmentation (VOS) and Multi-Object Tracking and Segmentation (MOTS), but there is little interaction between them due to the use of disparate benchmark datasets and metrics (e.g. J&F, mAP, sMOTSA). As a result, published works usually target a particular benchmark, and are not easily comparable to each another. We believe that the development of generalized methods that can tackle multiple tasks requires greater cohesion among these research sub-communities. In this paper, we aim to facilitate this by proposing BURST, a dataset which contains thousands of diverse videos with high-quality object masks, and an associated benchmark with six tasks involving object tracking and segmentation in video. All tasks are evaluated using the same data and comparable metrics, which enables researchers to consider them in unison, and hence, more effectively pool knowledge from different methods across different tasks. Additionally, we demonstrate several baselines for all tasks and show that approaches for one task can be applied to another with a quantifiable and explainable performance difference. Dataset annotations and evaluation code is available at: https://github.com/Ali2500/BURST-benchmark.
Detecting Invisible People
Dec 15, 2020
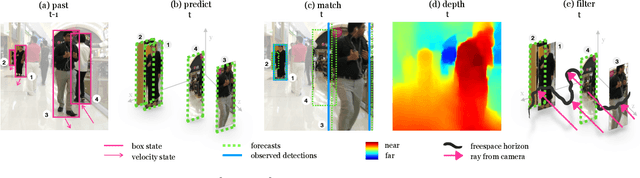

Monocular object detection and tracking have improved drastically in recent years, but rely on a key assumption: that objects are visible to the camera. Many offline tracking approaches reason about occluded objects post-hoc, by linking together tracklets after the object re-appears, making use of reidentification (ReID). However, online tracking in embodied robotic agents (such as a self-driving vehicle) fundamentally requires object permanence, which is the ability to reason about occluded objects before they re-appear. In this work, we re-purpose tracking benchmarks and propose new metrics for the task of detecting invisible objects, focusing on the illustrative case of people. We demonstrate that current detection and tracking systems perform dramatically worse on this task. We introduce two key innovations to recover much of this performance drop. We treat occluded object detection in temporal sequences as a short-term forecasting challenge, bringing to bear tools from dynamic sequence prediction. Second, we build dynamic models that explicitly reason in 3D, making use of observations produced by state-of-the-art monocular depth estimation networks. To our knowledge, ours is the first work to demonstrate the effectiveness of monocular depth estimation for the task of tracking and detecting occluded objects. Our approach strongly improves by 11.4% over the baseline in ablations and by 5.0% over the state-of-the-art in F1 score.
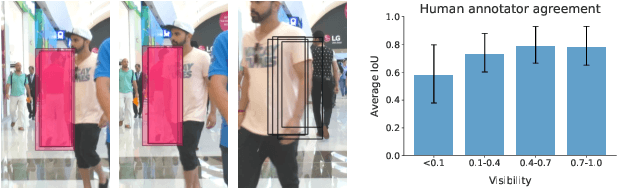
TAO: A Large-Scale Benchmark for Tracking Any Object
May 20, 2020
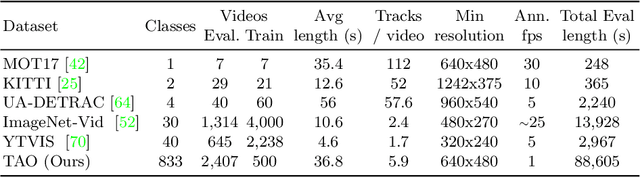

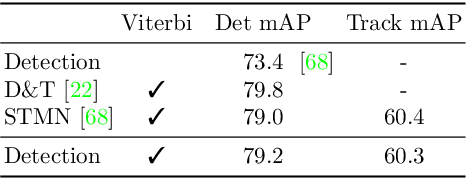
For many years, multi-object tracking benchmarks have focused on a handful of categories. Motivated primarily by surveillance and self-driving applications, these datasets provide tracks for people, vehicles, and animals, ignoring the vast majority of objects in the world. By contrast, in the related field of object detection, the introduction of large-scale, diverse datasets (e.g., COCO) have fostered significant progress in developing highly robust solutions. To bridge this gap, we introduce a similarly diverse dataset for Tracking Any Object (TAO). It consists of 2,907 high resolution videos, captured in diverse environments, which are half a minute long on average. Importantly, we adopt a bottom-up approach for discovering a large vocabulary of 833 categories, an order of magnitude more than prior tracking benchmarks. To this end, we ask annotators to label objects that move at any point in the video, and give names to them post factum. Our vocabulary is both significantly larger and qualitatively different from existing tracking datasets. To ensure scalability of annotation, we employ a federated approach that focuses manual effort on labeling tracks for those relevant objects in a video (e.g., those that move). We perform an extensive evaluation of state-of-the-art trackers and make a number of important discoveries regarding large-vocabulary tracking in an open-world. In particular, we show that existing single- and multi-object trackers struggle when applied to this scenario in the wild, and that detection-based, multi-object trackers are in fact competitive with user-initialized ones. We hope that our dataset and analysis will boost further progress in the tracking community.