 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAD2Render: A Modular Toolkit for GPU-accelerated Photorealistic Synthetic Data Generation for the Manufacturing Industry
Nov 25, 2022The use of computer vision for product and assembly quality control is becoming ubiquitous in the manufacturing industry. Lately, it is apparent that machine learning based solutions are outperforming classical computer vision algorithms in terms of performance and robustness. However, a main drawback is that they require sufficiently large and labeled training datasets, which are often not available or too tedious and too time consuming to acquire. This is especially true for low-volume and high-variance manufacturing. Fortunately, in this industry, CAD models of the manufactured or assembled products are available. This paper introduces CAD2Render, a GPU-accelerated synthetic data generator based on the Unity High Definition Render Pipeline (HDRP). CAD2Render is designed to add variations in a modular fashion, making it possible for high customizable data generation, tailored to the needs of the industrial use case at hand. Although CAD2Render is specifically designed for manufacturing use cases, it can be used for other domains as well. We validate CAD2Render by demonstrating state of the art performance in two industrial relevant setups. We demonstrate that the data generated by our approach can be used to train object detection and pose estimation models with a high enough accuracy to direct a robot. The code for CAD2Render is available at https://github.com/EDM-Research/CAD2Render.
CenDerNet: Center and Curvature Representations for Render-and-Compare 6D Pose Estimation
Aug 21, 2022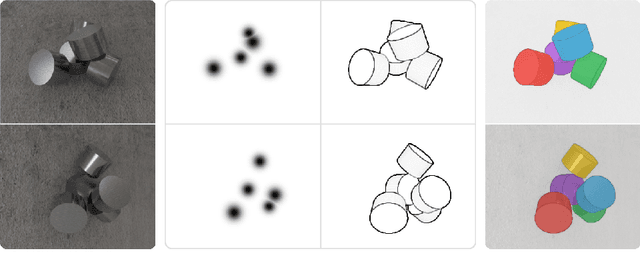
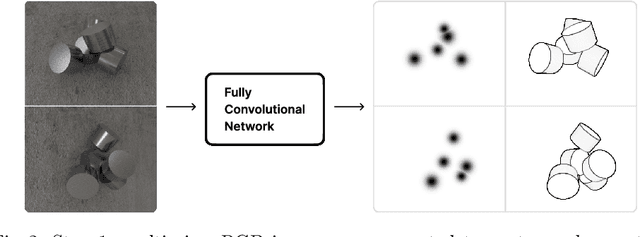
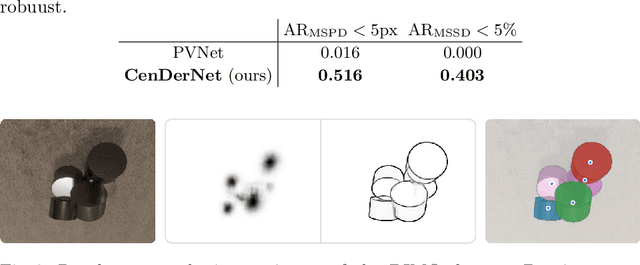
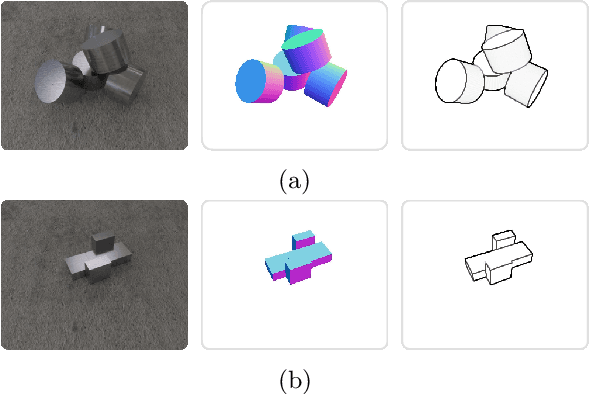
We introduce CenDerNet, a framework for 6D pose estimation from multi-view images based on center and curvature representations. Finding precise poses for reflective, textureless objects is a key challenge for industrial robotics. Our approach consists of three stages: First, a fully convolutional neural network predicts center and curvature heatmaps for each view; Second, center heatmaps are used to detect object instances and find their 3D centers; Third, 6D object poses are estimated using 3D centers and curvature heatmaps. By jointly optimizing poses across views using a render-and-compare approach, our method naturally handles occlusions and object symmetries. We show that CenDerNet outperforms previous methods on two industry-relevant datasets: DIMO and T-LESS.