 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCenDerNet: Center and Curvature Representations for Render-and-Compare 6D Pose Estimation
Aug 21, 2022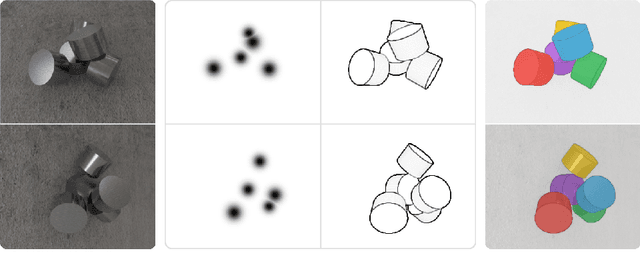
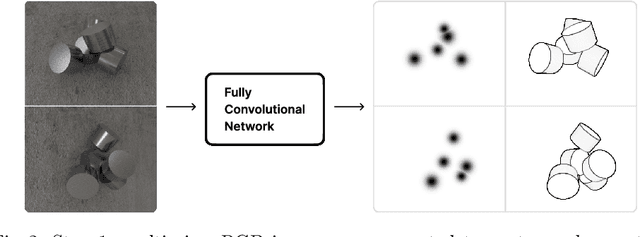
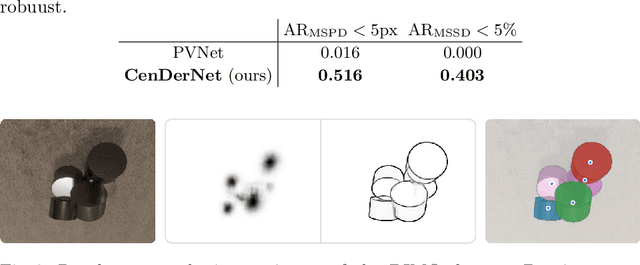
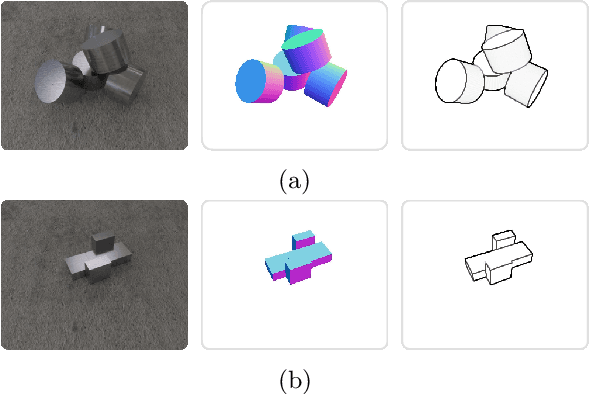
We introduce CenDerNet, a framework for 6D pose estimation from multi-view images based on center and curvature representations. Finding precise poses for reflective, textureless objects is a key challenge for industrial robotics. Our approach consists of three stages: First, a fully convolutional neural network predicts center and curvature heatmaps for each view; Second, center heatmaps are used to detect object instances and find their 3D centers; Third, 6D object poses are estimated using 3D centers and curvature heatmaps. By jointly optimizing poses across views using a render-and-compare approach, our method naturally handles occlusions and object symmetries. We show that CenDerNet outperforms previous methods on two industry-relevant datasets: DIMO and T-LESS.
Dataset of Industrial Metal Objects
Aug 08, 2022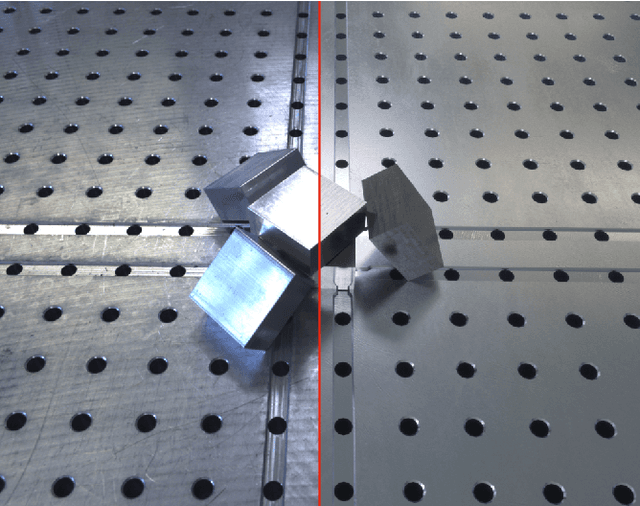

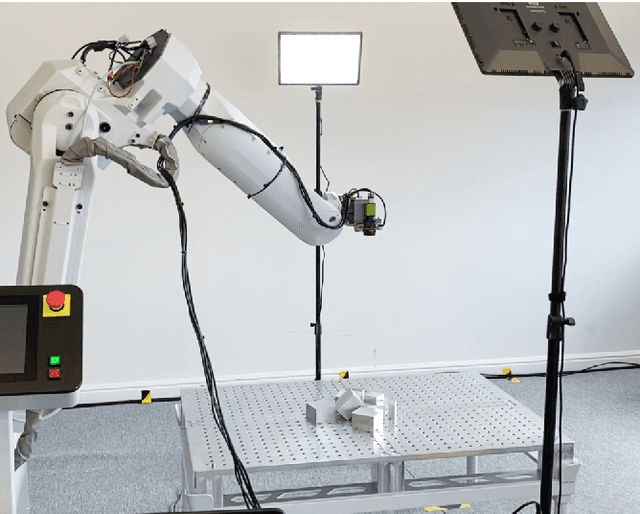
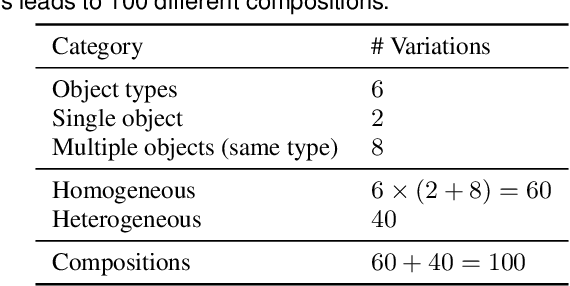
We present a diverse dataset of industrial metal objects. These objects are symmetric, textureless and highly reflective, leading to challenging conditions not captured in existing datasets. Our dataset contains both real-world and synthetic multi-view RGB images with 6D object pose labels. Real-world data is obtained by recording multi-view images of scenes with varying object shapes, materials, carriers, compositions and lighting conditions. This results in over 30,000 images, accurately labelled using a new public tool. Synthetic data is obtained by carefully simulating real-world conditions and varying them in a controlled and realistic way. This leads to over 500,000 synthetic images. The close correspondence between synthetic and real-world data, and controlled variations, will facilitate sim-to-real research. Our dataset's size and challenging nature will facilitate research on various computer vision tasks involving reflective materials. The dataset and accompanying resources are made available on the project website at https://pderoovere.github.io/dimo.