 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Model Discrimination of Switched Nonlinear Systems with Temporal Logic Inference
Jun 16, 2023This paper addresses the problem of data-driven model discrimination for unknown switched systems with unknown linear temporal logic (LTL) specifications, representing tasks, that govern their mode sequences, where only sampled data of the unknown dynamics and tasks are available. To tackle this problem, we propose data-driven methods to over-approximate the unknown dynamics and to infer the unknown specifications such that both set-membership models of the unknown dynamics and LTL formulas are guaranteed to include the ground truth model and specification/task. Moreover, we present an optimization-based algorithm for analyzing the distinguishability of a set of learned/inferred model-task pairs as well as a model discrimination algorithm for ruling out model-task pairs from this set that are inconsistent with new observations at run time. Further, we present an approach for reducing the size of inferred specifications to increase the computational efficiency of the model discrimination algorithms.
Weak Adaptive Submodularity and Group-Based Active Diagnosis with Applications to State Estimation with Persistent Sensor Faults
Apr 12, 2017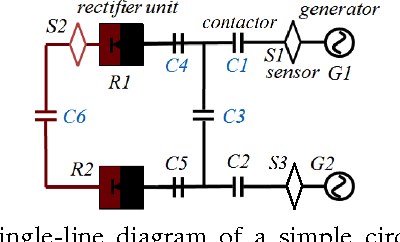
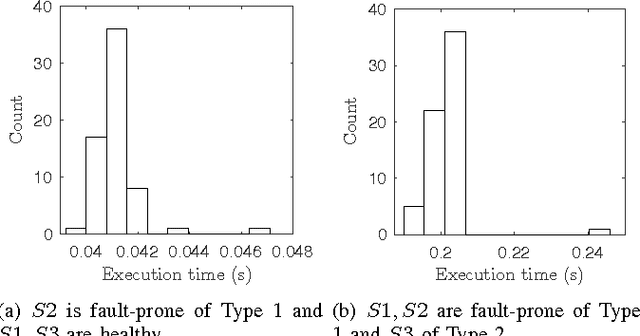

In this paper, we consider adaptive decision-making problems for stochastic state estimation with partial observations. First, we introduce the concept of weak adaptive submodularity, a generalization of adaptive submodularity, which has found great success in solving challenging adaptive state estimation problems. Then, for the problem of active diagnosis, i.e., discrete state estimation via active sensing, we show that an adaptive greedy policy has a near-optimal performance guarantee when the reward function possesses this property. We further show that the reward function for group-based active diagnosis, which arises in applications such as medical diagnosis and state estimation with persistent sensor faults, is also weakly adaptive submodular. Finally, in experiments of state estimation for an aircraft electrical system with persistent sensor faults, we observe that an adaptive greedy policy performs equally well as an exhaustive search.
Set-Point Regulation of Linear Continuous-Time Systems using Neuromorphic Vision Sensors
Sep 18, 2016

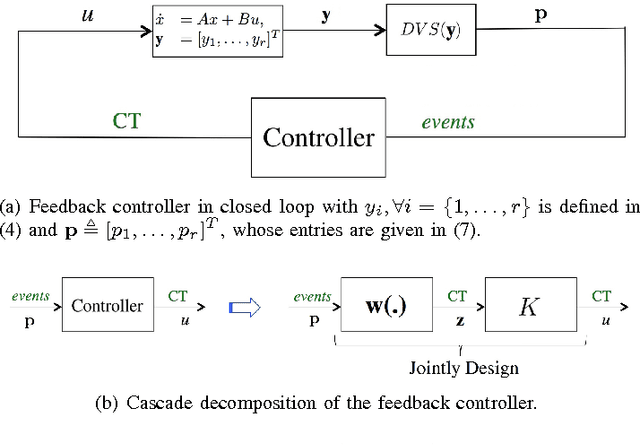
Recently developed neuromorphic vision sensors have become promising candidates for agile and autonomous robotic applications primarily due to, in particular, their high temporal resolution and low latency. Each pixel of this sensor independently fires an asynchronous stream of "retinal events" once a change in the light field is detected. Existing computer vision algorithms can only process periodic frames and so a new class of algorithms needs to be developed that can efficiently process these events for control tasks. In this paper, we investigate the problem of regulating a continuous-time linear time invariant (LTI) system to a desired point using measurements from a neuromorphic sensor. We present an $H_\infty$ controller that regulates the LTI system to a desired set-point and provide the set of neuromorphic sensor based cameras for the given system that fulfill the regulation task. The effectiveness of our approach is illustrated on an unstable system.
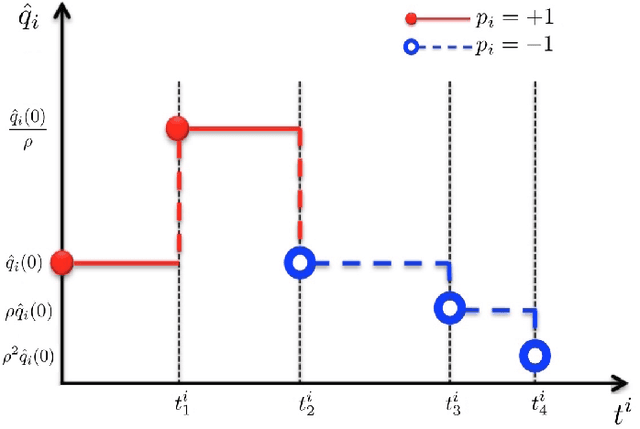
Simultaneous Mode, Input and State Estimation for Switched Linear Stochastic Systems
Jun 27, 2016
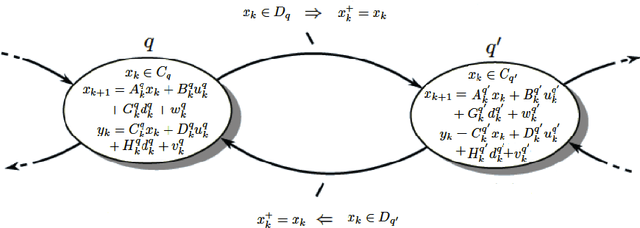
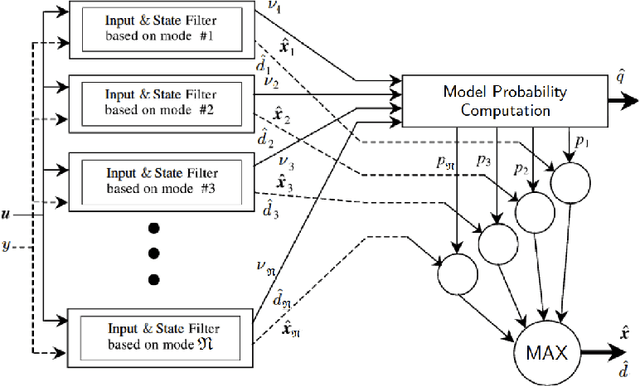
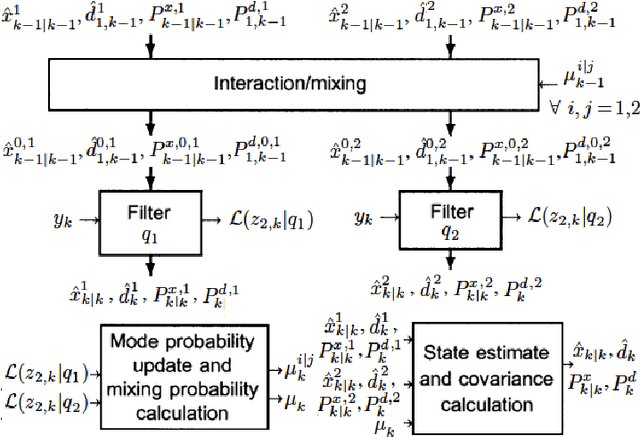
In this paper, we propose a filtering algorithm for simultaneously estimating the mode, input and state of hidden mode switched linear stochastic systems with unknown inputs. Using a multiple-model approach with a bank of linear input and state filters for each mode, our algorithm relies on the ability to find the most probable model as a mode estimate, which we show is possible with input and state filters by identifying a key property, that a particular residual signal we call generalized innovation is a Gaussian white noise. We also provide an asymptotic analysis for the proposed algorithm and provide sufficient conditions for asymptotically achieving convergence to the true model (consistency), or to the 'closest' model according to an information-theoretic measure (convergence). A simulation example of intention-aware vehicles at an intersection is given to demonstrate the effectiveness of our approach.
A Survey of Motion Planning and Control Techniques for Self-driving Urban Vehicles
Apr 25, 2016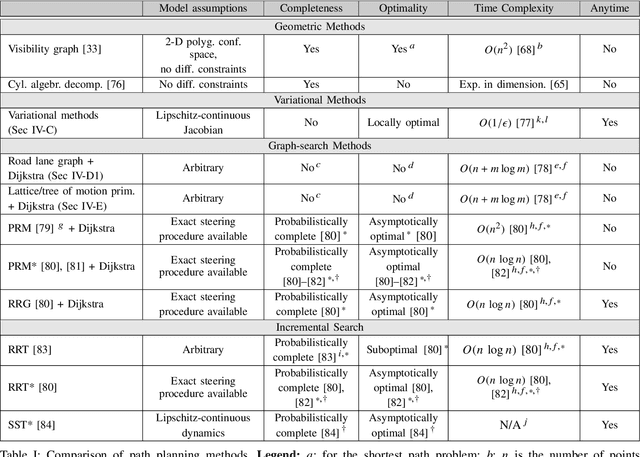
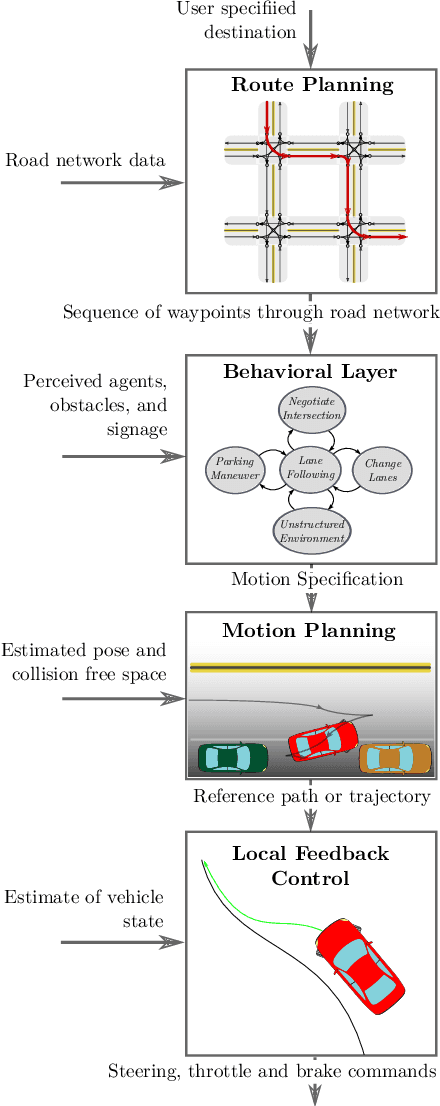


Self-driving vehicles are a maturing technology with the potential to reshape mobility by enhancing the safety, accessibility, efficiency, and convenience of automotive transportation. Safety-critical tasks that must be executed by a self-driving vehicle include planning of motions through a dynamic environment shared with other vehicles and pedestrians, and their robust executions via feedback control. The objective of this paper is to survey the current state of the art on planning and control algorithms with particular regard to the urban setting. A selection of proposed techniques is reviewed along with a discussion of their effectiveness. The surveyed approaches differ in the vehicle mobility model used, in assumptions on the structure of the environment, and in computational requirements. The side-by-side comparison presented in this survey helps to gain insight into the strengths and limitations of the reviewed approaches and assists with system level design choices.