 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Detection and Motion Planning for Automated Welding of Tubular Joints
Sep 27, 2018
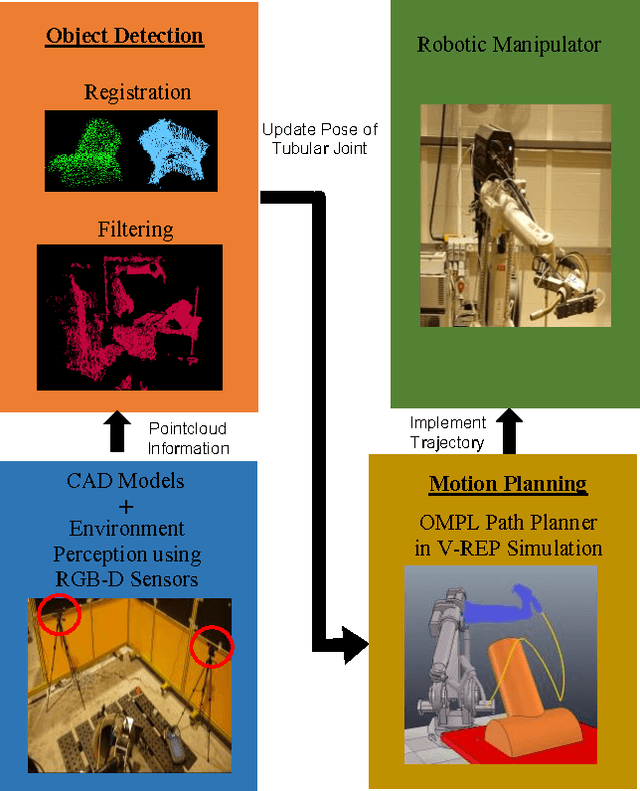
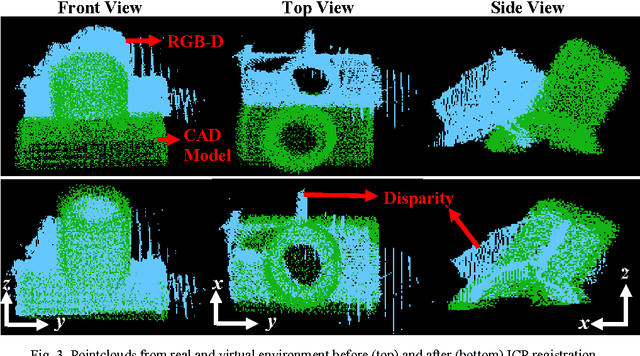
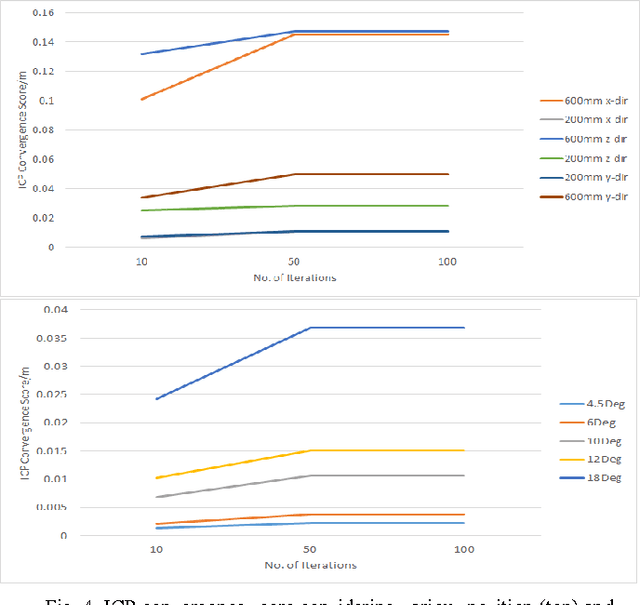
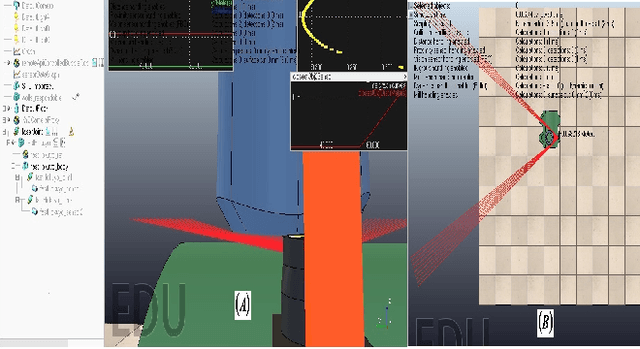
Automatic welding of tubular TKY joints is an important and challenging task for the marine and offshore industry. In this paper, a framework for tubular joint detection and motion planning is proposed. The pose of the real tubular joint is detected using RGB-D sensors, which is used to obtain a real-to-virtual mapping for positioning the workpiece in a virtual environment. For motion planning, a Bi-directional Transition based Rapidly exploring Random Tree (BiTRRT) algorithm is used to generate trajectories for reaching the desired goals. The complete framework is verified with experiments, and the results show that the robot welding torch is able to transit without collision to desired goals which are close to the tubular joint.
Edge and Corner Detection for Unorganized 3D Point Clouds with Application to Robotic Welding
Sep 27, 2018



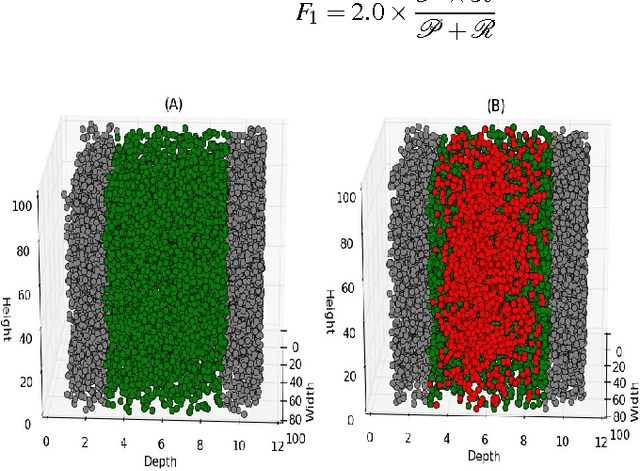
In this paper, we propose novel edge and corner detection algorithms for unorganized point clouds. Our edge detection method evaluates symmetry in a local neighborhood and uses an adaptive density based threshold to differentiate 3D edge points. We extend this algorithm to propose a novel corner detector that clusters curvature vectors and uses their geometrical statistics to classify a point as corner. We perform rigorous evaluation of the algorithms on RGB-D semantic segmentation and 3D washer models from the ShapeNet dataset and report higher precision and recall scores. Finally, we also demonstrate how our edge and corner detectors can be used as a novel approach towards automatic weld seam detection for robotic welding. We propose to generate weld seams directly from a point cloud as opposed to using 3D models for offline planning of welding paths. For this application, we show a comparison between Harris 3D and our proposed approach on a panel workpiece.
Model-Free 3D Reconstruction of Weld Joint Using Laser Scanning
Jul 08, 2015
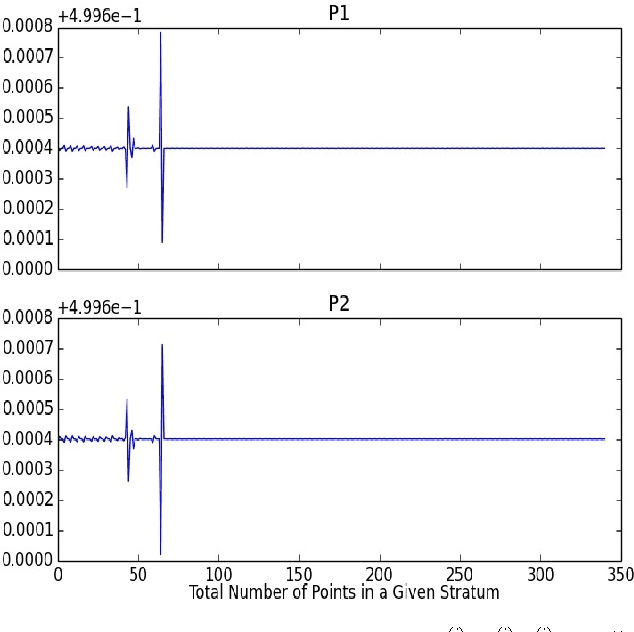
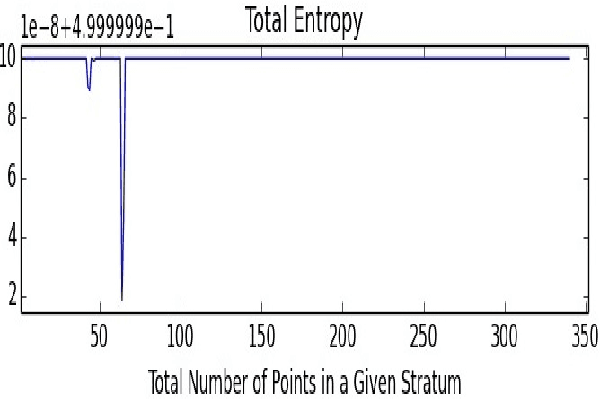
This article presents a novel utilization of the concept of entropy in information theory to model-free 3D reconstruction of weld joint in presence of noise. We show that our formulation attains its global minimum at the upper edge of this joint. This property significantly simplifies the extraction of this welding joint. Furthermore, we present an approach to compute the volume of this extracted space to facilitate the monitoring of the progress of the welding task. Moreover, we provide a preliminary analysis of the effect of variation of the noise on the extraction process of this space to realize the impact of this noise on the computation of its area and volume.
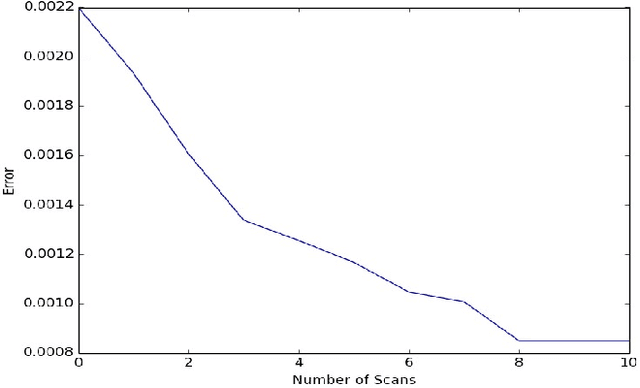
An Adaptive Sampling Approach to 3D Reconstruction of Weld Joint
Jul 08, 2015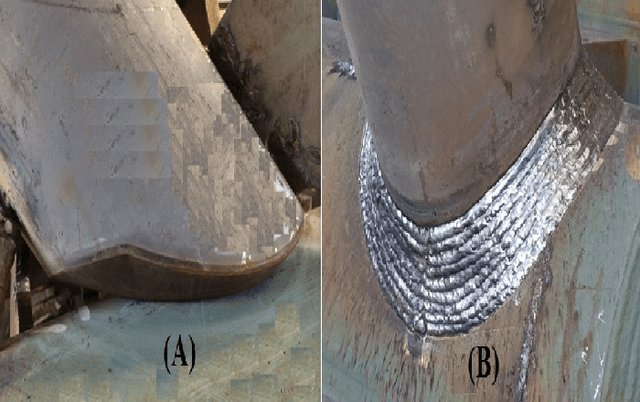
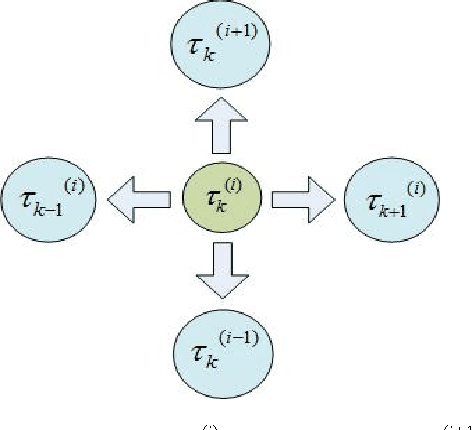
We present an adaptive sampling approach to 3D reconstruction of the welding joint using the point cloud that is generated by a laser sensor. We start with a randomized strategy to approximate the surface of the volume of interest through selection of a number of pivotal candidates. Furthermore, we introduce three proposal distributions over the neighborhood of each of these pivots to adaptively sample from their neighbors to refine the original randomized approximation to incrementally reconstruct this welding space. We prevent our algorithm from being trapped in a neighborhood via permanently labeling the visited samples. In addition, we accumulate the accepted candidates along with their selected neighbors in a queue structure to allow every selected sample to contribute to the evolution of the reconstructed welding space as the algorithm progresses. We analyze the performance of our adaptive sampling algorithm in contrast to the random sampling, with and without replacement, to show a significant improvement in total number of samples that are drawn to identify the region of interest, thereby expanding upon neighboring samples to extract the entire region in a fewer iterations and a shorter computation time.