Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Detection and Motion Planning for Automated Welding of Tubular Joints
Paper and Code
Sep 27, 2018
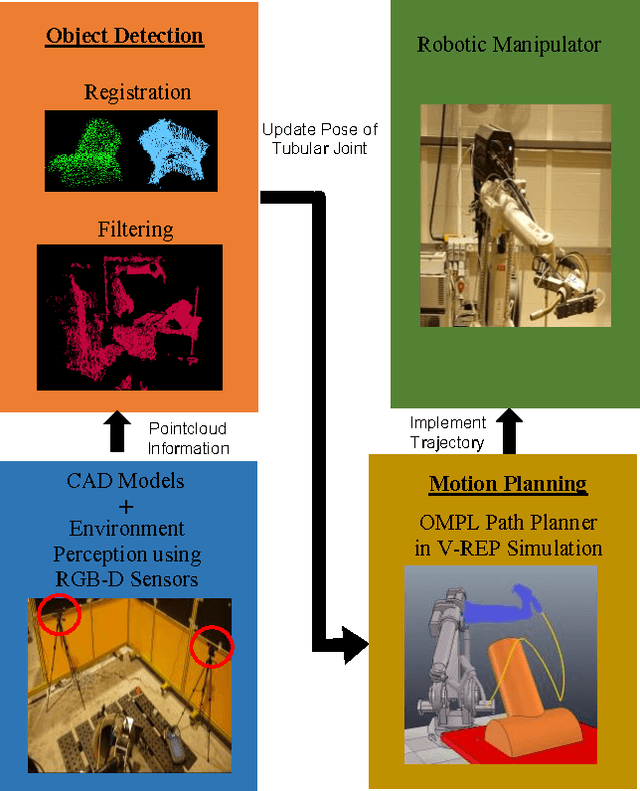
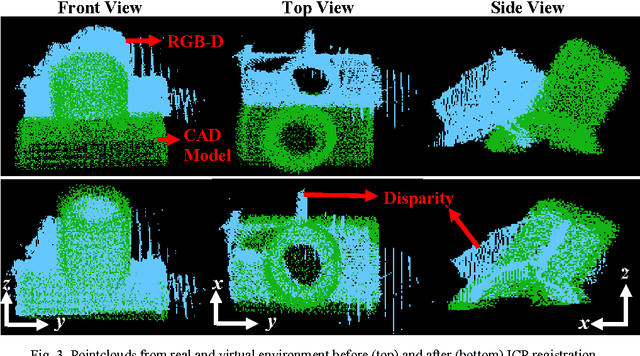
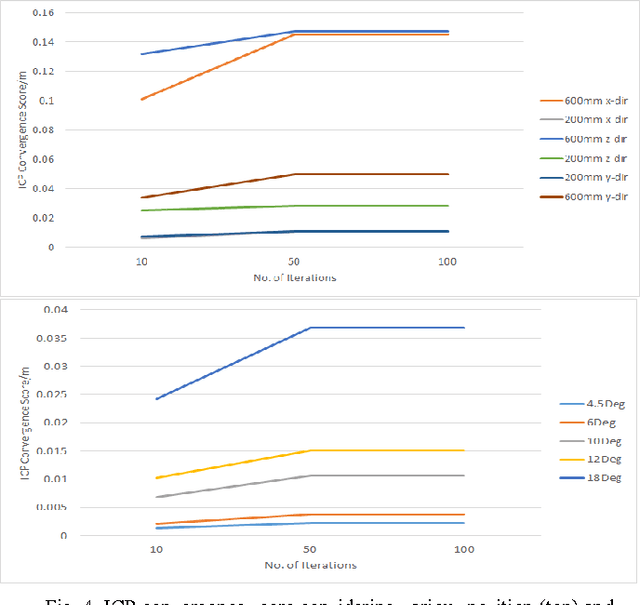
Automatic welding of tubular TKY joints is an important and challenging task for the marine and offshore industry. In this paper, a framework for tubular joint detection and motion planning is proposed. The pose of the real tubular joint is detected using RGB-D sensors, which is used to obtain a real-to-virtual mapping for positioning the workpiece in a virtual environment. For motion planning, a Bi-directional Transition based Rapidly exploring Random Tree (BiTRRT) algorithm is used to generate trajectories for reaching the desired goals. The complete framework is verified with experiments, and the results show that the robot welding torch is able to transit without collision to desired goals which are close to the tubular joint.
View paper on