 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Detection and Motion Planning for Automated Welding of Tubular Joints
Sep 27, 2018
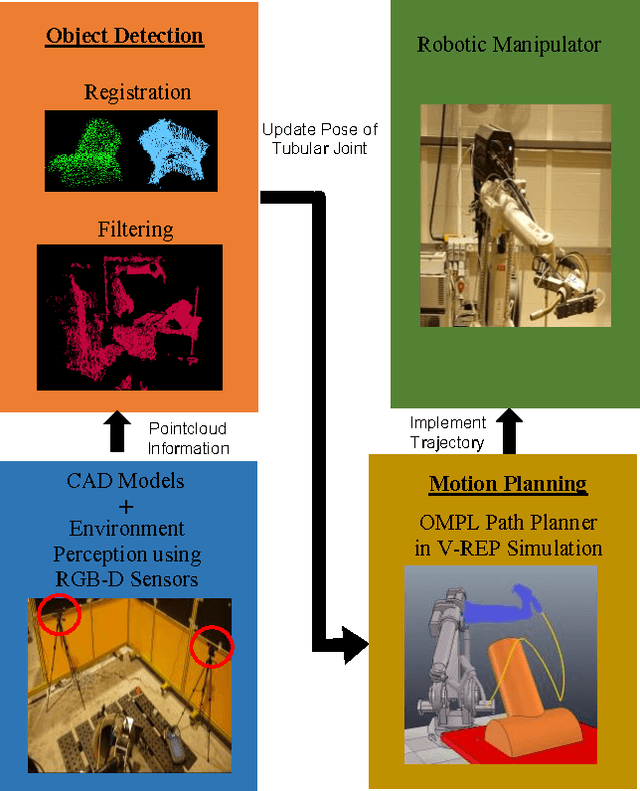
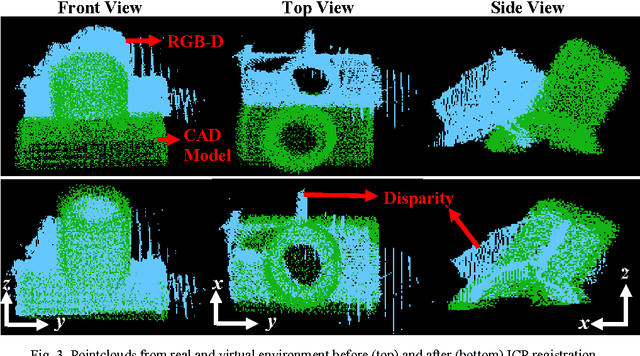
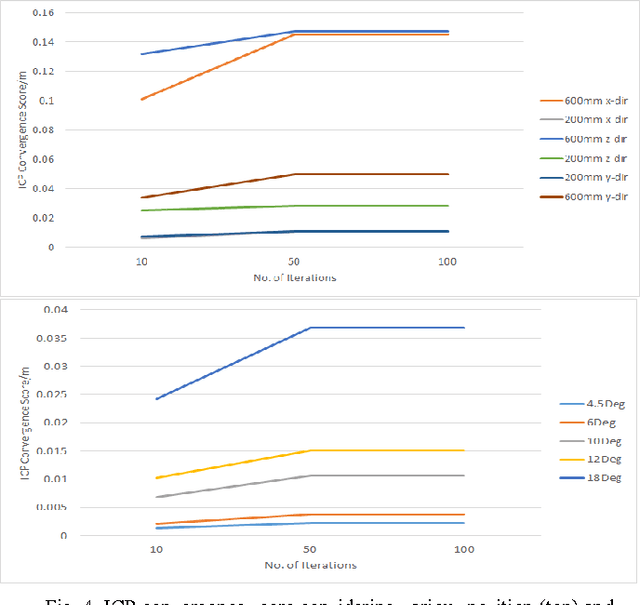
Automatic welding of tubular TKY joints is an important and challenging task for the marine and offshore industry. In this paper, a framework for tubular joint detection and motion planning is proposed. The pose of the real tubular joint is detected using RGB-D sensors, which is used to obtain a real-to-virtual mapping for positioning the workpiece in a virtual environment. For motion planning, a Bi-directional Transition based Rapidly exploring Random Tree (BiTRRT) algorithm is used to generate trajectories for reaching the desired goals. The complete framework is verified with experiments, and the results show that the robot welding torch is able to transit without collision to desired goals which are close to the tubular joint.
Edge and Corner Detection for Unorganized 3D Point Clouds with Application to Robotic Welding
Sep 27, 2018



In this paper, we propose novel edge and corner detection algorithms for unorganized point clouds. Our edge detection method evaluates symmetry in a local neighborhood and uses an adaptive density based threshold to differentiate 3D edge points. We extend this algorithm to propose a novel corner detector that clusters curvature vectors and uses their geometrical statistics to classify a point as corner. We perform rigorous evaluation of the algorithms on RGB-D semantic segmentation and 3D washer models from the ShapeNet dataset and report higher precision and recall scores. Finally, we also demonstrate how our edge and corner detectors can be used as a novel approach towards automatic weld seam detection for robotic welding. We propose to generate weld seams directly from a point cloud as opposed to using 3D models for offline planning of welding paths. For this application, we show a comparison between Harris 3D and our proposed approach on a panel workpiece.