 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Adaptive Sampling Approach to 3D Reconstruction of Weld Joint
Paper and Code
Jul 08, 2015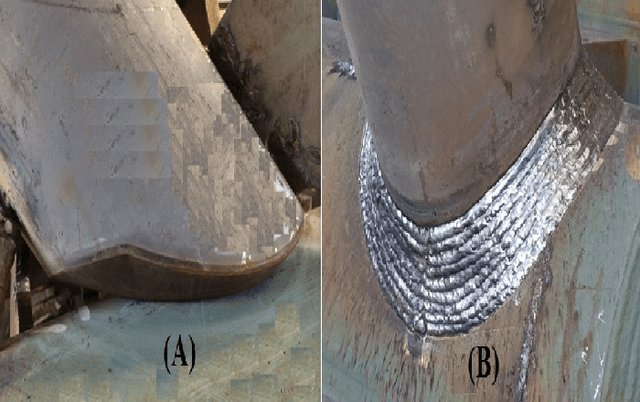
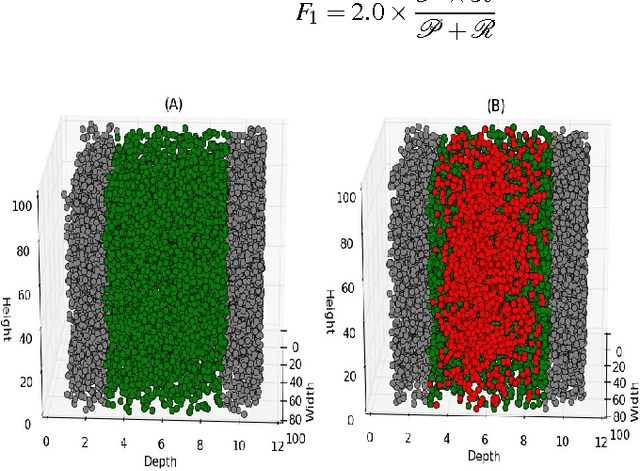
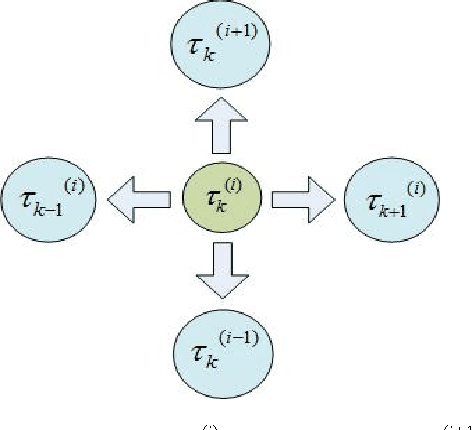
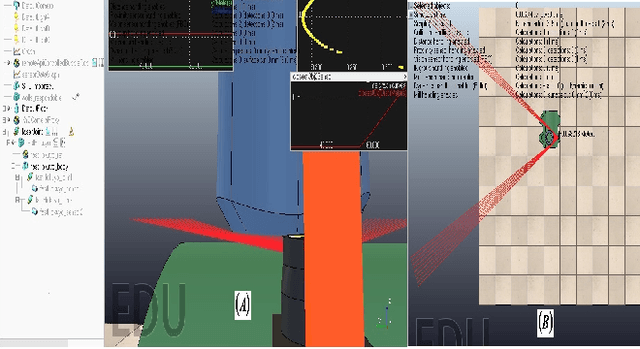
We present an adaptive sampling approach to 3D reconstruction of the welding joint using the point cloud that is generated by a laser sensor. We start with a randomized strategy to approximate the surface of the volume of interest through selection of a number of pivotal candidates. Furthermore, we introduce three proposal distributions over the neighborhood of each of these pivots to adaptively sample from their neighbors to refine the original randomized approximation to incrementally reconstruct this welding space. We prevent our algorithm from being trapped in a neighborhood via permanently labeling the visited samples. In addition, we accumulate the accepted candidates along with their selected neighbors in a queue structure to allow every selected sample to contribute to the evolution of the reconstructed welding space as the algorithm progresses. We analyze the performance of our adaptive sampling algorithm in contrast to the random sampling, with and without replacement, to show a significant improvement in total number of samples that are drawn to identify the region of interest, thereby expanding upon neighboring samples to extract the entire region in a fewer iterations and a shorter computation time.