 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgeb-it-bots RoboCup@Work Team Description Paper 2023
Dec 29, 2023This paper presents the b-it-bots RoboCup@Work team and its current hardware and functional architecture for the KUKA youBot robot. We describe the underlying software framework and the developed capabilities required for operating in industrial environments including features such as reliable and precise navigation, flexible manipulation, robust object recognition and task planning. New developments include an approach to grasp vertical objects, placement of objects by considering the empty space on a workstation, and the process of porting our code to ROS2.
Machine learning approaches to understand the influence of urban environments on human's physiological response
Dec 10, 2018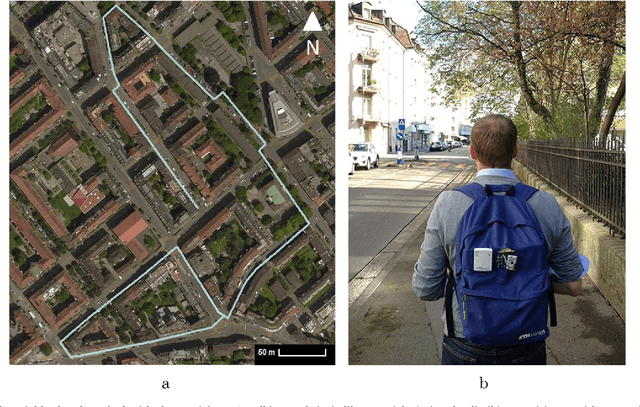
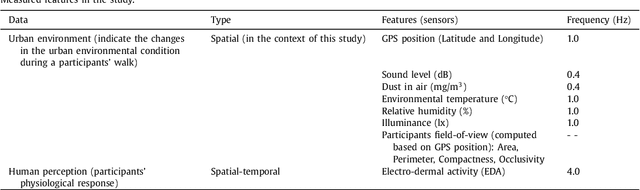
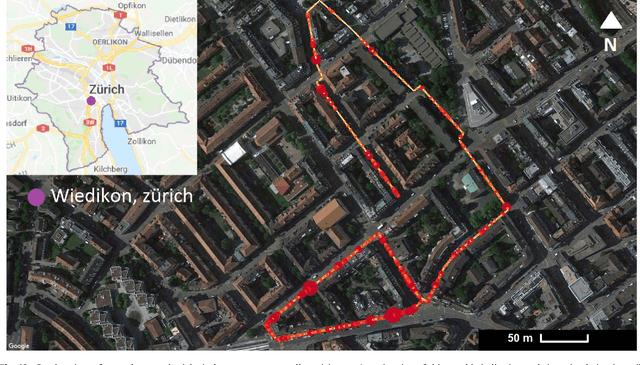
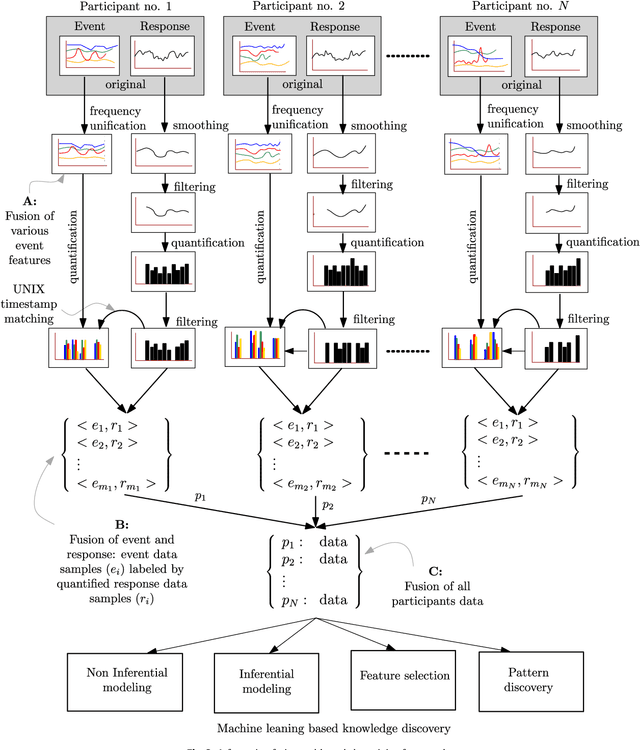
This research proposes a framework for signal processing and information fusion of spatial-temporal multi-sensor data pertaining to understanding patterns of humans physiological changes in an urban environment. The framework includes signal frequency unification, signal pairing, signal filtering, signal quantification, and data labeling. Furthermore, this paper contributes to human-environment interaction research, where a field study to understand the influence of environmental features such as varying sound level, illuminance, field-of-view, or environmental conditions on humans' perception was proposed. In the study, participants of various demographic backgrounds walked through an urban environment in Zurich, Switzerland while wearing physiological and environmental sensors. Apart from signal processing, four machine learning techniques, classification, fuzzy rule-based inference, feature selection, and clustering, were applied to discover relevant patterns and relationship between the participants' physiological responses and environmental conditions. The predictive models with high accuracies indicate that the change in the field-of-view corresponds to increased participant arousal. Among all features, the participants' physiological responses were primarily affected by the change in environmental conditions and field-of-view.
Towards a Robot Perception Specification Language
Aug 13, 2014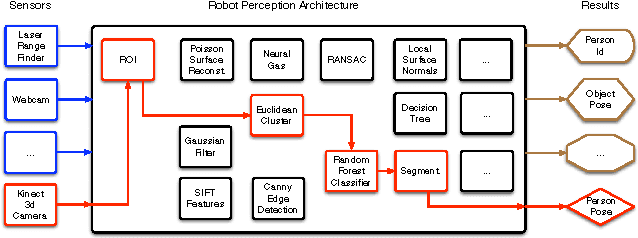
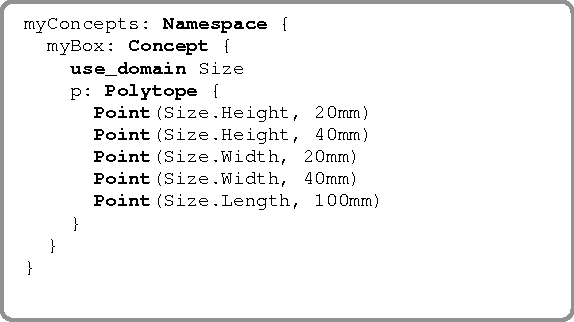
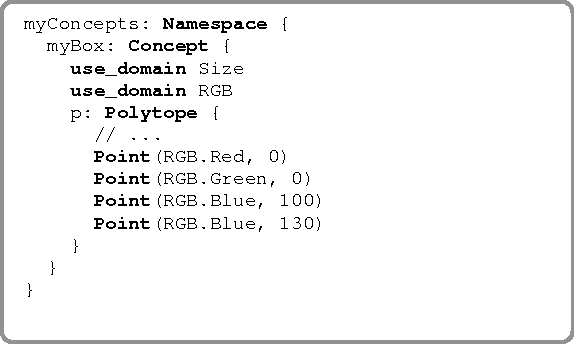
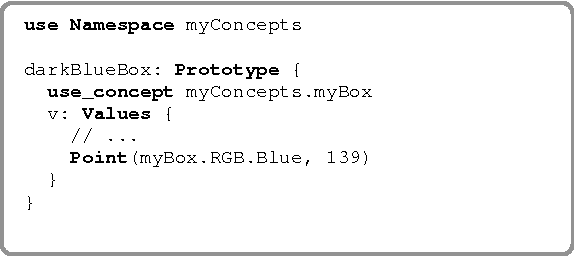
In this paper we present our work in progress towards a domain-specific language called Robot Perception Specification Language (RPSL). RSPL provide means to specify the expected result (task knowledge) of a Robot Perception Architecture in a declarative and framework-independent manner.