Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Robot Perception Specification Language
Paper and Code
Aug 13, 2014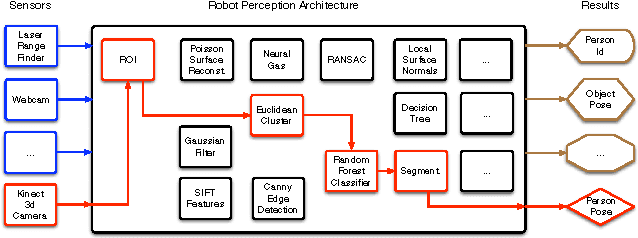
In this paper we present our work in progress towards a domain-specific language called Robot Perception Specification Language (RPSL). RSPL provide means to specify the expected result (task knowledge) of a Robot Perception Architecture in a declarative and framework-independent manner.
* Presented at DSLRob 2013 (arXiv:cs/1312.5952)
View paper on