 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgeb-it-bots RoboCup@Work Team Description Paper 2023
Dec 29, 2023This paper presents the b-it-bots RoboCup@Work team and its current hardware and functional architecture for the KUKA youBot robot. We describe the underlying software framework and the developed capabilities required for operating in industrial environments including features such as reliable and precise navigation, flexible manipulation, robust object recognition and task planning. New developments include an approach to grasp vertical objects, placement of objects by considering the empty space on a workstation, and the process of porting our code to ROS2.
Comparative Evaluation of Pretrained Transfer Learning Models on Automatic Short Answer Grading
Sep 02, 2020


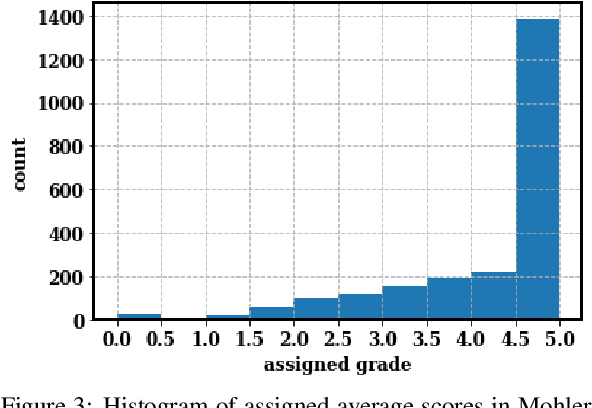
Automatic Short Answer Grading (ASAG) is the process of grading the student answers by computational approaches given a question and the desired answer. Previous works implemented the methods of concept mapping, facet mapping, and some used the conventional word embeddings for extracting semantic features. They extracted multiple features manually to train on the corresponding datasets. We use pretrained embeddings of the transfer learning models, ELMo, BERT, GPT, and GPT-2 to assess their efficiency on this task. We train with a single feature, cosine similarity, extracted from the embeddings of these models. We compare the RMSE scores and correlation measurements of the four models with previous works on Mohler dataset. Our work demonstrates that ELMo outperformed the other three models. We also, briefly describe the four transfer learning models and conclude with the possible causes of poor results of transfer learning models.
Performance Evaluation of Low-Cost Machine Vision Cameras for Image-Based Grasp Verification
Mar 23, 2020
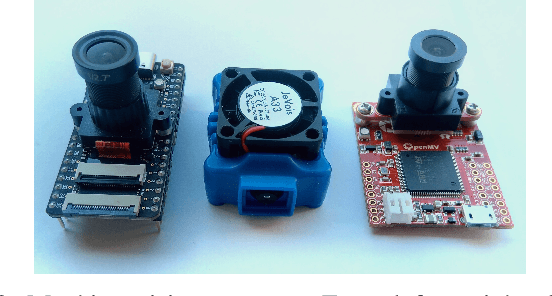


Grasp verification is advantageous for autonomous manipulation robots as they provide the feedback required for higher level planning components about successful task completion. However, a major obstacle in doing grasp verification is sensor selection. In this paper, we propose a vision based grasp verification system using machine vision cameras, with the verification problem formulated as an image classification task. Machine vision cameras consist of a camera and a processing unit capable of on-board deep learning inference. The inference in these low-power hardware are done near the data source, reducing the robot's dependence on a centralized server, leading to reduced latency, and improved reliability. Machine vision cameras provide the deep learning inference capabilities using different neural accelerators. Although, it is not clear from the documentation of these cameras what is the effect of these neural accelerators on performance metrics such as latency and throughput. To systematically benchmark these machine vision cameras, we propose a parameterized model generator that generates end to end models of Convolutional Neural Networks(CNN). Using these generated models we benchmark latency and throughput of two machine vision cameras, JeVois A33 and Sipeed Maix Bit. Our experiments demonstrate that the selected machine vision camera and the deep learning models can robustly verify grasp with 97% per frame accuracy.