 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Zero Shot" Point Cloud Upsampling
Jun 25, 2021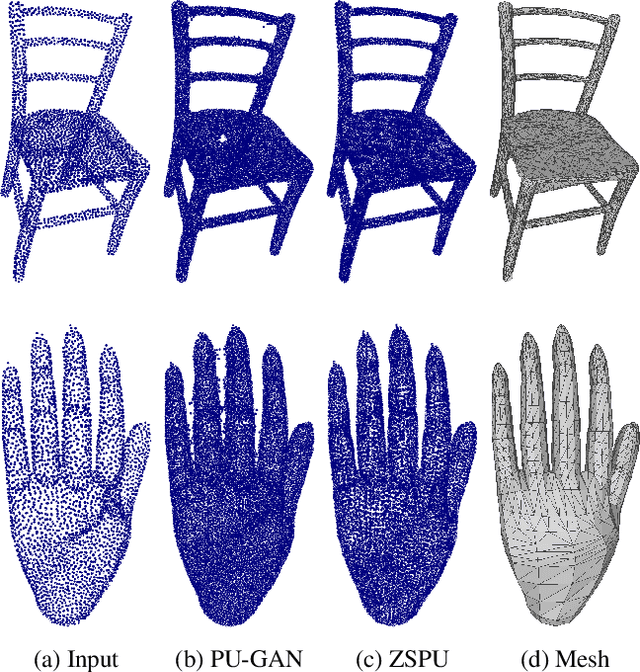
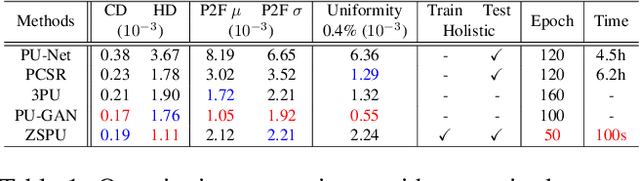
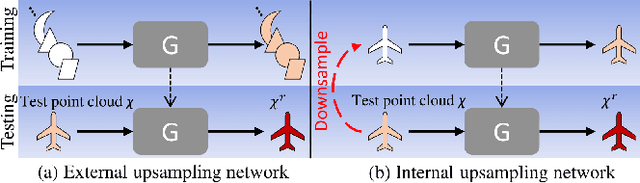
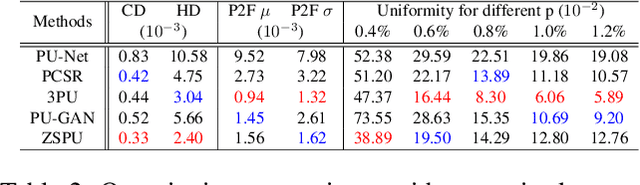
Point cloud upsampling using deep learning has been paid various efforts in the past few years. Recent supervised deep learning methods are restricted to the size of training data and is limited in terms of covering all shapes of point clouds. Besides, the acquisition of such amount of data is unrealistic, and the network generally performs less powerful than expected on unseen records. In this paper, we present an unsupervised approach to upsample point clouds internally referred as "Zero Shot" Point Cloud Upsampling (ZSPU) at holistic level. Our approach is solely based on the internal information provided by a particular point cloud without patching in both self-training and testing phases. This single-stream design significantly reduces the training time of the upsampling task, by learning the relation between low-resolution (LR) point clouds and their high (original) resolution (HR) counterparts. This association will provide super-resolution (SR) outputs when original point clouds are loaded as input. We demonstrate competitive performance on benchmark point cloud datasets when compared to other upsampling methods. Furthermore, ZSPU achieves superior qualitative results on shapes with complex local details or high curvatures.
Process Knowledge Driven Change Point Detection for Automated Calibration of Discrete Event Simulation Models Using Machine Learning
May 11, 2020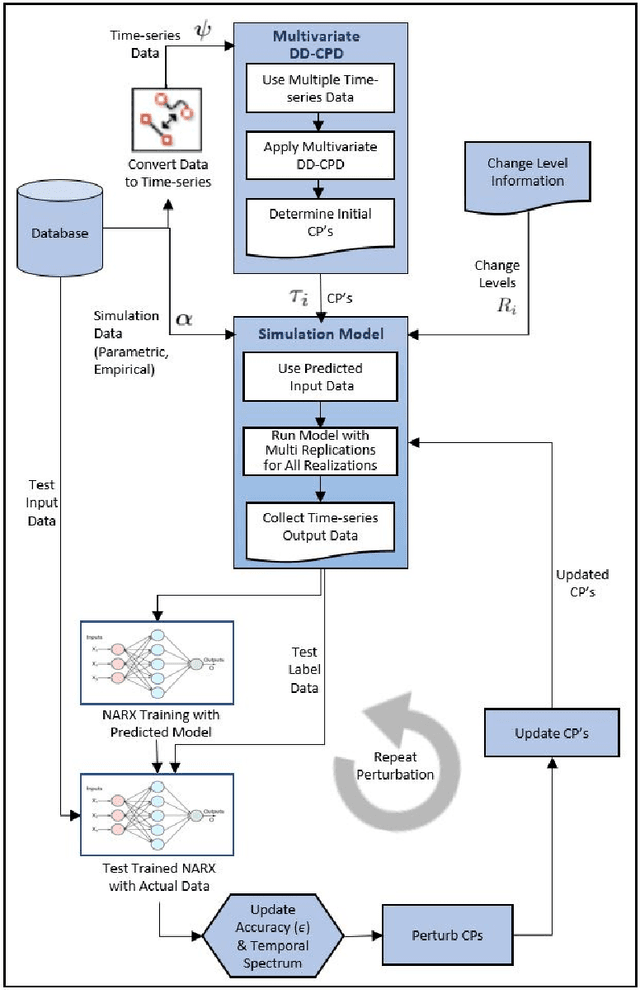
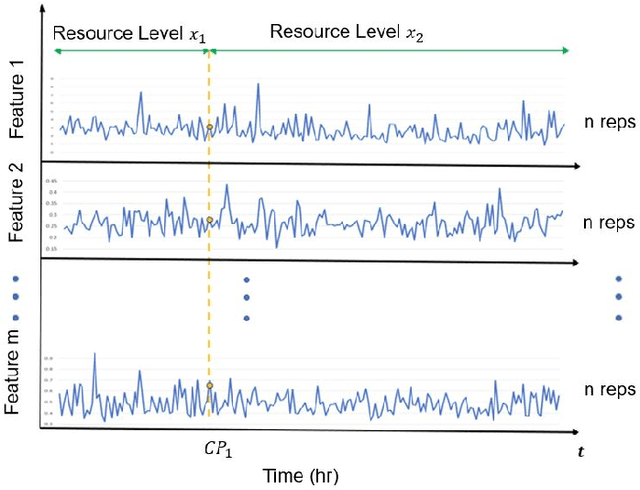
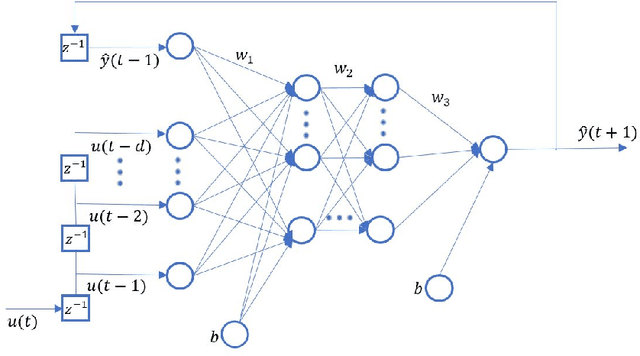
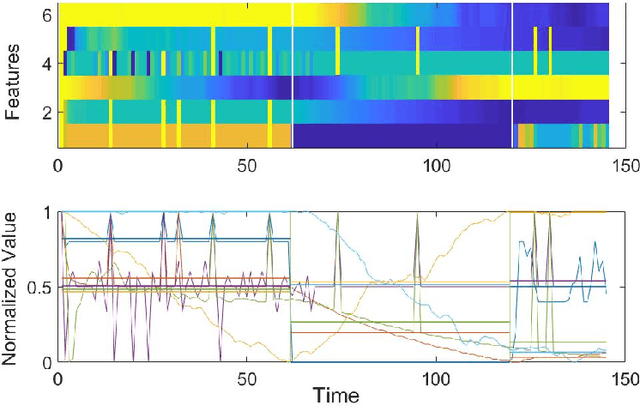
Initial development and subsequent calibration of discrete event simulation models for complex systems require accurate identification of dynamically changing process characteristics. Existing data driven change point methods (DD-CPD) assume changes are extraneous to the system, thus cannot utilize available process knowledge. This work proposes a unified framework for process-driven multi-variate change point detection (PD-CPD) by combining change point detection models with machine learning and process-driven simulation modeling. The PD-CPD, after initializing with DD-CPD's change point(s), uses simulation models to generate system level outputs as time-series data streams which are then used to train neural network models to predict system characteristics and change points. The accuracy of the predictive models measures the likelihood that the actual process data conforms to the simulated change points in system characteristics. PD-CPD iteratively optimizes change points by repeating simulation and predictive model building steps until the set of change point(s) with the maximum likelihood is identified. Using an emergency department case study, we show that PD-CPD significantly improves change point detection accuracy over DD-CPD estimates and is able to detect actual change points.
Res-CR-Net, a residual network with a novel architecture optimized for the semantic segmentation of microscopy images
Apr 14, 2020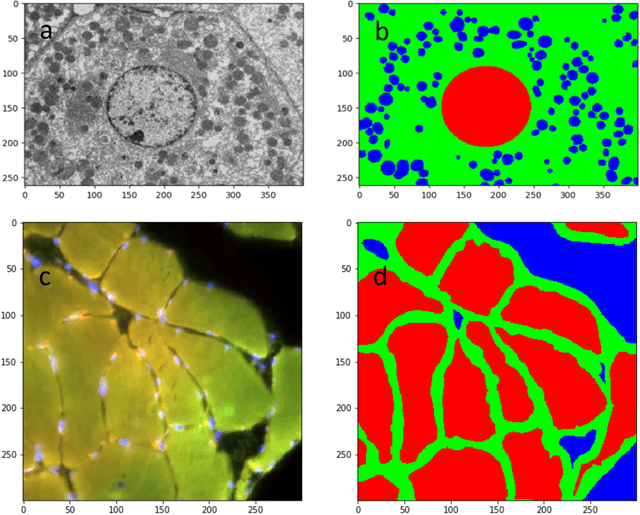

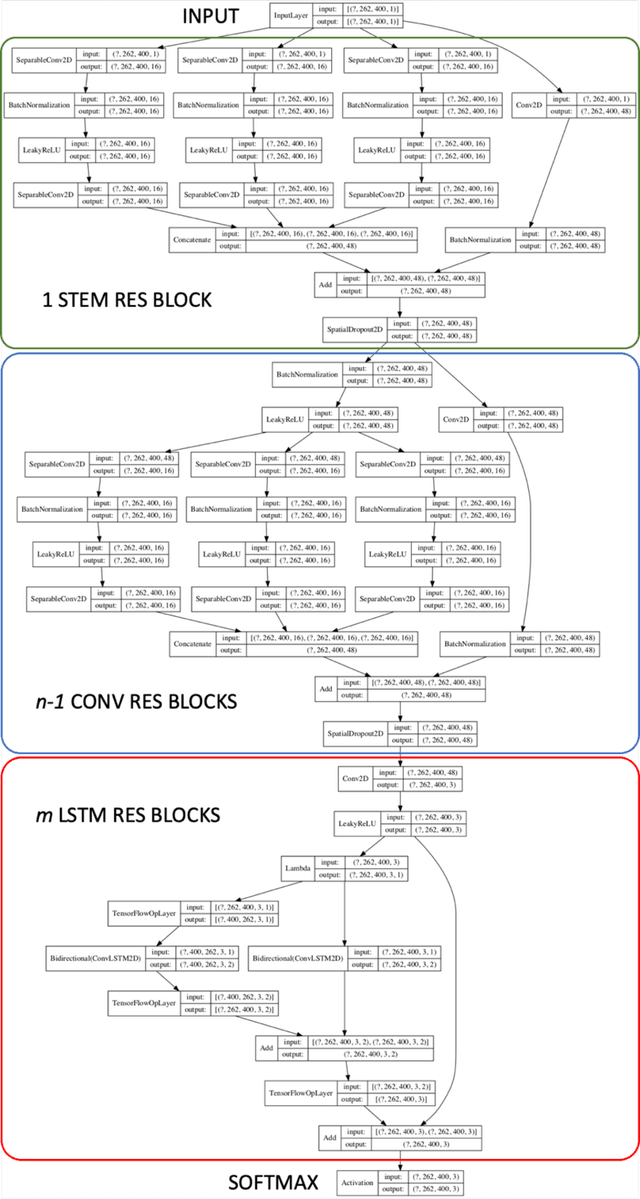
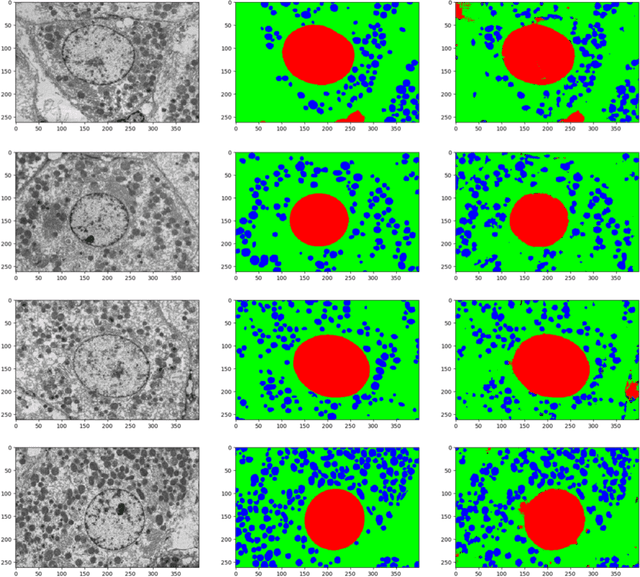
Deep Neural Networks (DNN) have been widely used to carry out segmentation tasks in both electron and light microscopy. Most DNNs developed for this purpose are based on some variation of the encoder-decoder type U-Net architecture, in combination with residual blocks to increase ease of training and resilience to gradient degradation. Here we introduce Res-CR-Net, a type of DNN that features residual blocks with either a bundle of separable atrous convolutions with different dilation rates or a convolutional LSTM. The number of filters used in each residual block and the number of blocks are the only hyperparameters that need to be modified in order to optimize the network training for a variety of different microscopy images.