 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Twin-based SIM Communication and Flight Control for Advanced Air Mobility
Jan 03, 2025



Electric Vertical Take-off and Landing vehicles (eVTOLs) are driving Advanced Air Mobility (AAM) toward transforming urban transportation by extending travel from congested ground networks to low-altitude airspace. This transition promises to reduce traffic congestion and significantly shorten commute times. To ensure aviation safety, eVTOLs must fly within prescribed flight corridors. These corridors are managed by ground-based Air Traffic Control (ATCo) stations, which oversee air-ground communication and flight scheduling. However, one critical challenge remains: the lack of high rate air-ground communication and safe flight planning within these corridors. The introduction of 6G-oriented Stacked Intelligent Metasurface (SIM) technology presents a high rate communication solution. With advanced phase-shifting capabilities, SIM enables precise wireless signal control and supports beam-tracking communication with eVTOLs. Leveraging this technology, we propose a Composite Potential Field (CPF) approach. This method dynamically integrates target, separation, and communication fields to optimize both SIM communication efficiency and flight safety. Simulation results validate the effectiveness of this DT-based approach. Compared to the potential field flight control benchmark, it improves the transmission rate by 8.3\%. Additionally, it reduces flight distance deviation from the prescribed corridor by 10\% compared to predetermined optimization methods.
RIS-empowered Topology Control for Distributed Learning in Urban Air Mobility
Mar 08, 2024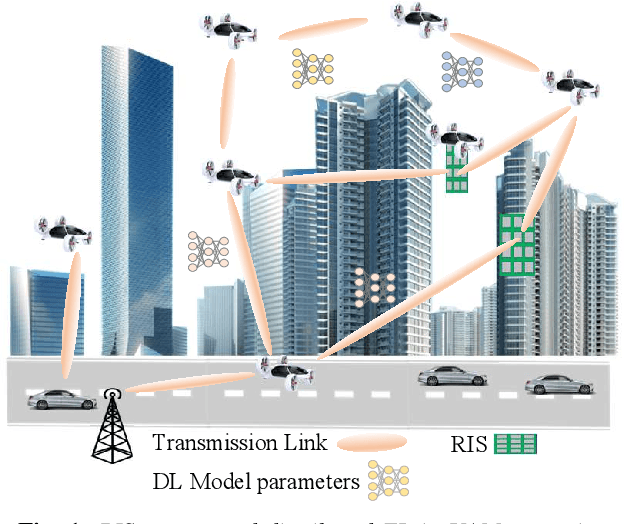
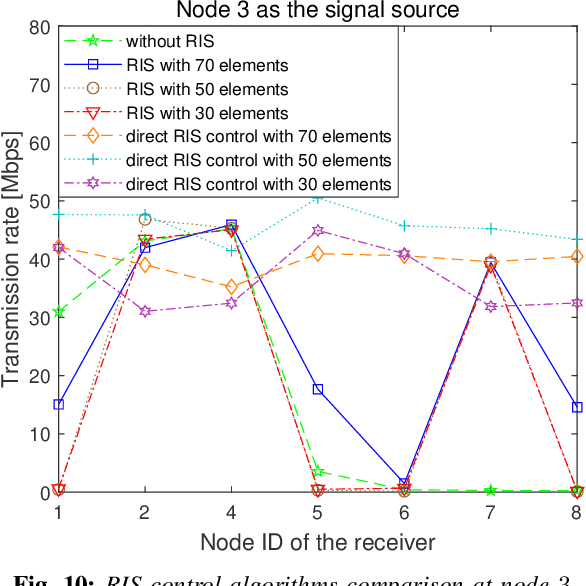

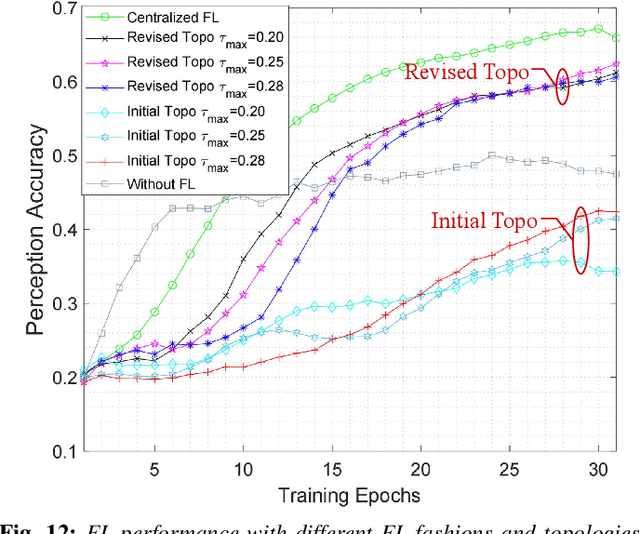
Urban Air Mobility (UAM) expands vehicles from the ground to the near-ground space, envisioned as a revolution for transportation systems. Comprehensive scene perception is the foundation for autonomous aerial driving. However, UAM encounters the intelligent perception challenge: high perception learning requirements conflict with the limited sensors and computing chips of flying cars. To overcome the challenge, federated learning (FL) and other collaborative learning have been proposed to enable resource-limited devices to conduct onboard deep learning (DL) collaboratively. But traditional collaborative learning like FL relies on a central integrator for DL model aggregation, which is difficult to deploy in dynamic environments. The fully decentralized learning schemes may be the intuitive solution while the convergence of distributed learning cannot be guaranteed. Accordingly, this paper explores reconfigurable intelligent surfaces (RIS) empowered distributed learning, taking account of topological attributes to facilitate the learning performance with convergence guarantee. We propose several FL topological criteria for optimizing the transmission delay and convergence rate by exploiting the Laplacian matrix eigenvalues of the communication network. Subsequently, we innovatively leverage the RIS link modification ability to remold the current network according to the proposed topological criteria. This paper rethinks the functions of RIS from the perspective of the network layer. Furthermore, a deep deterministic policy gradient-based RIS phase shift control algorithm is developed to construct or deconstruct the network links simultaneously to reshape the communication network. Simulation experiments are conducted over MobileNet-based multi-view learning to verify the efficiency of the distributed FL framework.
A Digital Twin Empowered Lightweight Model Sharing Scheme for Multi-Robot Systems
May 03, 2023



Multi-robot system for manufacturing is an Industry Internet of Things (IIoT) paradigm with significant operational cost savings and productivity improvement, where Unmanned Aerial Vehicles (UAVs) are employed to control and implement collaborative productions without human intervention. This mission-critical system relies on 3-Dimension (3-D) scene recognition to improve operation accuracy in the production line and autonomous piloting. However, implementing 3-D point cloud learning, such as Pointnet, is challenging due to limited sensing and computing resources equipped with UAVs. Therefore, we propose a Digital Twin (DT) empowered Knowledge Distillation (KD) method to generate several lightweight learning models and select the optimal model to deploy on UAVs. With a digital replica of the UAVs preserved at the edge server, the DT system controls the model sharing network topology and learning model structure to improve recognition accuracy further. Moreover, we employ network calculus to formulate and solve the model sharing configuration problem toward minimal resource consumption, as well as convergence. Simulation experiments are conducted over a popular point cloud dataset to evaluate the proposed scheme. Experiment results show that the proposed model sharing scheme outperforms the individual model in terms of computing resource consumption and recognition accuracy.
Connecting AI Learning and Blockchain Mining in 6G Systems
Apr 29, 2021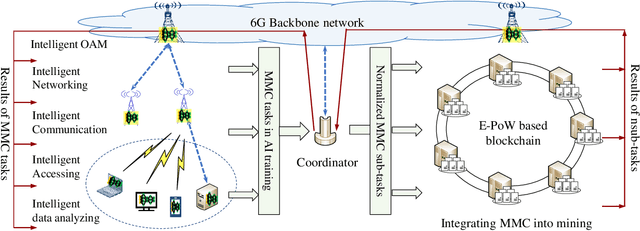
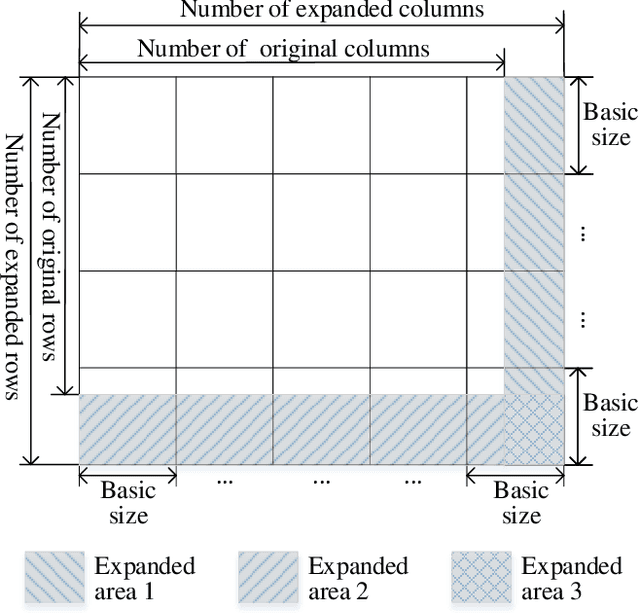
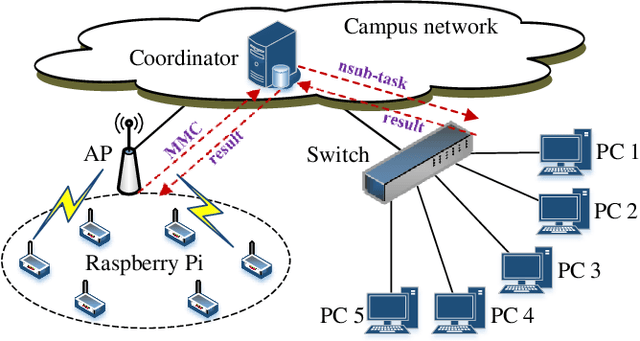
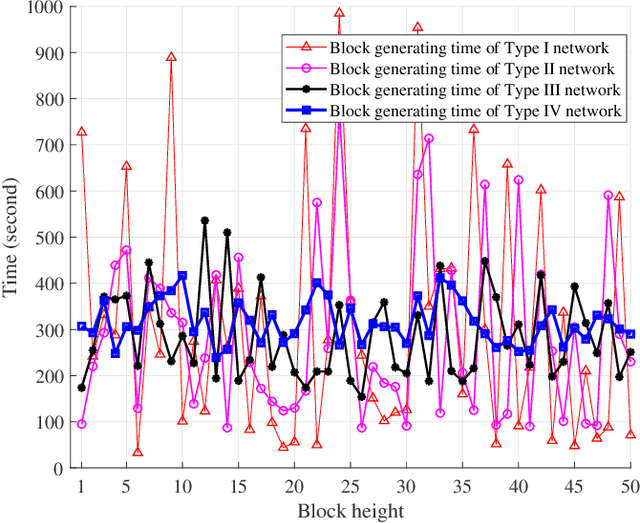
The sixth generation (6G) systems are generally recognized to be established on ubiquitous Artificial Intelligence (AI) and distributed ledger such as blockchain. However, the AI training demands tremendous computing resource, which is limited in most 6G devices. Meanwhile, miners in Proof-of-Work (PoW) based blockchains devote massive computing power to block mining, and are widely criticized for the waste of computation. To address this dilemma, we propose an Evolved-Proof-of-Work (E-PoW) consensus that can integrate the matrix computations, which are widely existed in AI training, into the process of brute-force searches in the block mining. Consequently, E-PoW can connect AI learning and block mining via the multiply used common computing resource. Experimental results show that E-PoW can salvage by up to 80 percent computing power from pure block mining for parallel AI training in 6G systems.
Deep Learning Based Intelligent Inter-Vehicle Distance Control for 6G Enabled Cooperative Autonomous Driving
Dec 26, 2020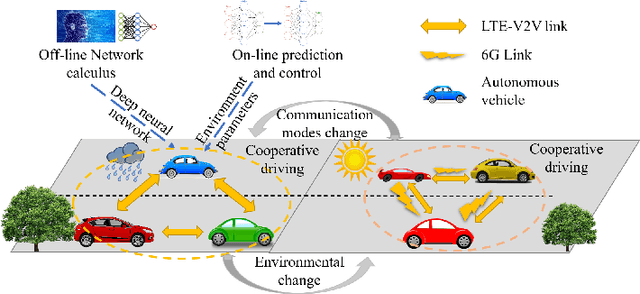
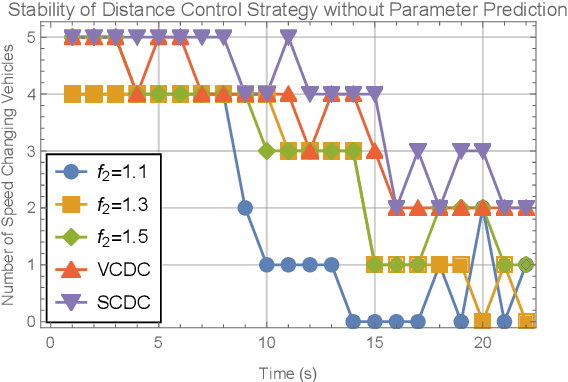
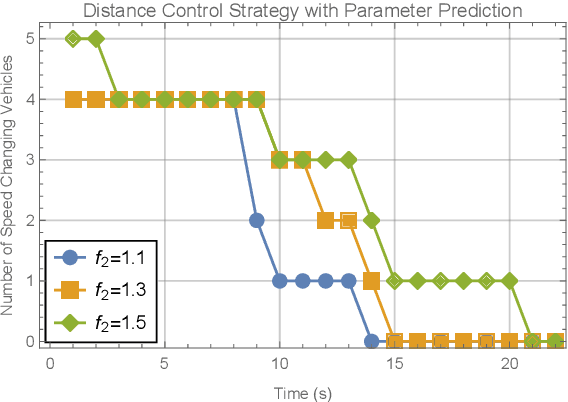
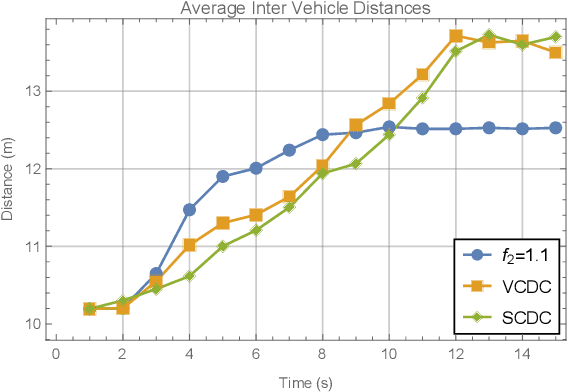
Research on the sixth generation cellular networks (6G) is gaining huge momentum to achieve ubiquitous wireless connectivity. Connected autonomous driving (CAV) is a critical vertical envisioned for 6G, holding great potentials of improving road safety, road and energy efficiency. However the stringent service requirements of CAV applications on reliability, latency and high speed communications will present big challenges to 6G networks. New channel access algorithms and intelligent control schemes for connected vehicles are needed for 6G supported CAV. In this paper, we investigated 6G supported cooperative driving, which is an advanced driving mode through information sharing and driving coordination. Firstly we quantify the delay upper bounds of 6G vehicle to vehicle (V2V) communications with hybrid communication and channel access technologies. A deep learning neural network is developed and trained for fast computation of the delay bounds in real time operations. Then, an intelligent strategy is designed to control the inter-vehicle distance for cooperative autonomous driving. Furthermore, we propose a Markov Chain based algorithm to predict the parameters of the system states, and also a safe distance mapping method to enable smooth vehicular speed changes. The proposed algorithms are implemented in the AirSim autonomous driving platform. Simulation results show that the proposed algorithms are effective and robust with safe and stable cooperative autonomous driving, which greatly improve the road safety, capacity and efficiency.