 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal Interpolation Is All You Need for Dynamic Neural Radiance Fields
Feb 18, 2023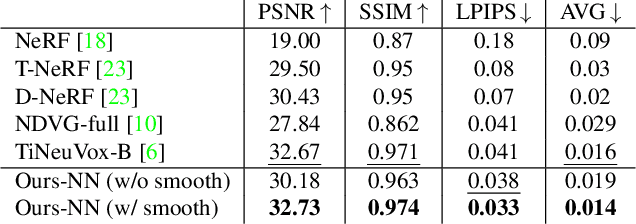
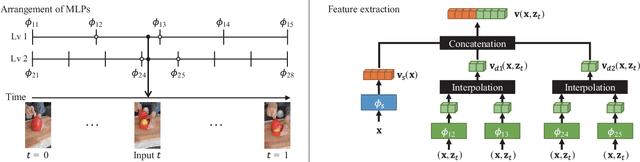
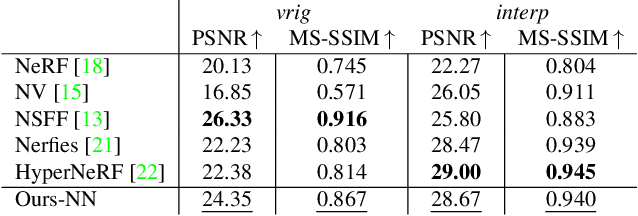
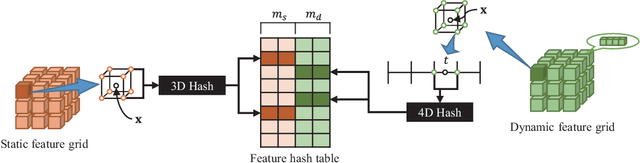
Temporal interpolation often plays a crucial role to learn meaningful representations in dynamic scenes. In this paper, we propose a novel method to train four-dimensional spatiotemporal neural radiance fields of dynamic scenes based on temporal interpolation of feature vectors. Two feature interpolation methods are suggested depending on underlying representations, neural or grid representation. In neural representation, we extract features from space-time inputs via multiple neural network modules and interpolate them based on time frames. The proposed multi-level feature interpolation network effectively captures features of both short-term and long-term time ranges. In grid representation, space-time features are learned via four-dimensional hash grids. The grid representation remarkably reduces training time, which is more than 100$\times$ faster compared to the neural network models, while maintaining the rendering quality of trained models. Concatenation of static and dynamic features and addition of simple smoothness term further improves the performance of the proposed models. Despite the simplicity of its network architecture, we demonstrate that the proposed method shows superior performance to previous works in neural representation and shows the fastest training speed in grid representation.
PANeRF: Pseudo-view Augmentation for Improved Neural Radiance Fields Based on Few-shot Inputs
Nov 23, 2022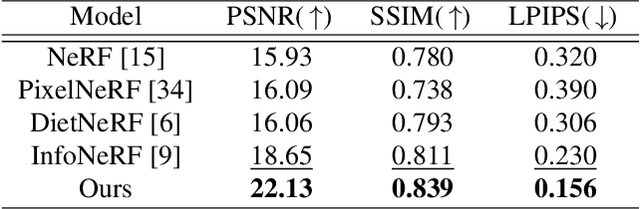
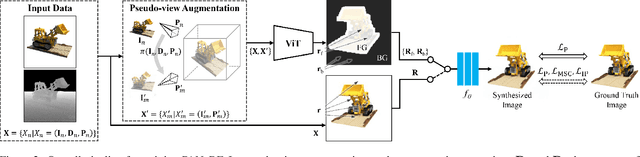

The method of neural radiance fields (NeRF) has been developed in recent years, and this technology has promising applications for synthesizing novel views of complex scenes. However, NeRF requires dense input views, typically numbering in the hundreds, for generating high-quality images. With a decrease in the number of input views, the rendering quality of NeRF for unseen viewpoints tends to degenerate drastically. To overcome this challenge, we propose pseudo-view augmentation of NeRF, a scheme that expands a sufficient amount of data by considering the geometry of few-shot inputs. We first initialized the NeRF network by leveraging the expanded pseudo-views, which efficiently minimizes uncertainty when rendering unseen views. Subsequently, we fine-tuned the network by utilizing sparse-view inputs containing precise geometry and color information. Through experiments under various settings, we verified that our model faithfully synthesizes novel-view images of superior quality and outperforms existing methods for multi-view datasets.
Procrustean Regression Networks: Learning 3D Structure of Non-Rigid Objects from 2D Annotations
Jul 21, 2020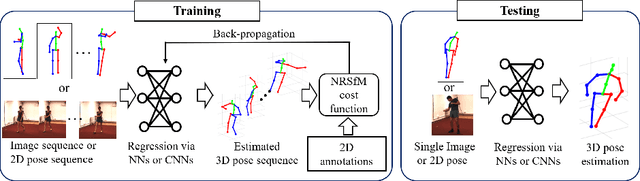
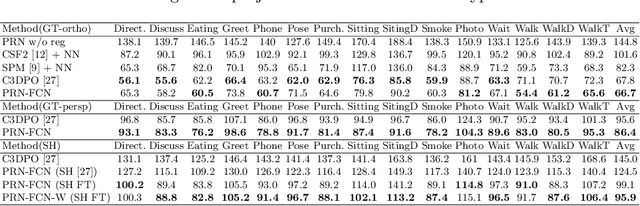

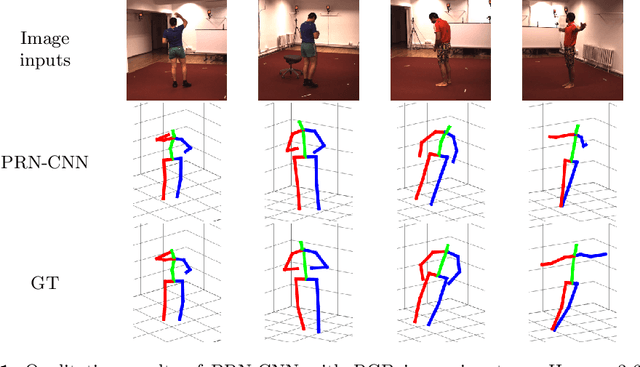
We propose a novel framework for training neural networks which is capable of learning 3D information of non-rigid objects when only 2D annotations are available as ground truths. Recently, there have been some approaches that incorporate the problem setting of non-rigid structure-from-motion (NRSfM) into deep learning to learn 3D structure reconstruction. The most important difficulty of NRSfM is to estimate both the rotation and deformation at the same time, and previous works handle this by regressing both of them. In this paper, we resolve this difficulty by proposing a loss function wherein the suitable rotation is automatically determined. Trained with the cost function consisting of the reprojection error and the low-rank term of aligned shapes, the network learns the 3D structures of such objects as human skeletons and faces during the training, whereas the testing is done in a single-frame basis. The proposed method can handle inputs with missing entries and experimental results validate that the proposed framework shows superior reconstruction performance to the state-of-the-art method on the Human 3.6M, 300-VW, and SURREAL datasets, even though the underlying network structure is very simple.
Pose estimator and tracker using temporal flow maps for limbs
May 23, 2019
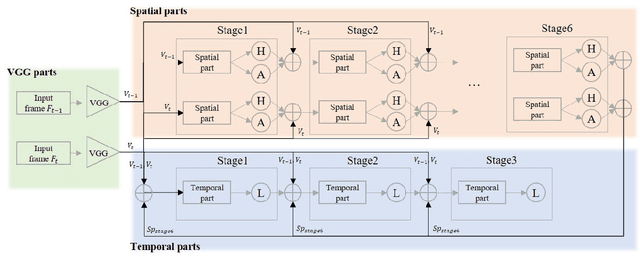
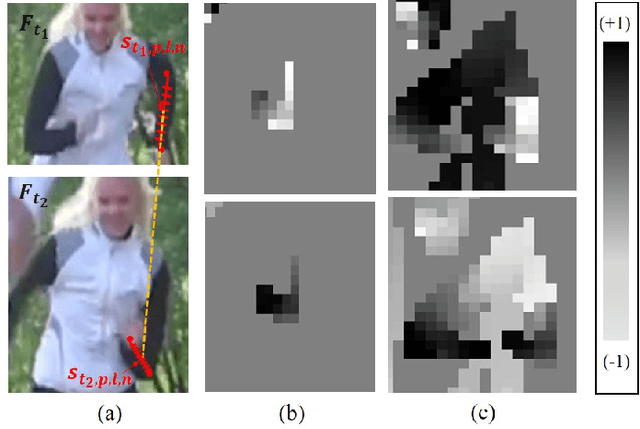
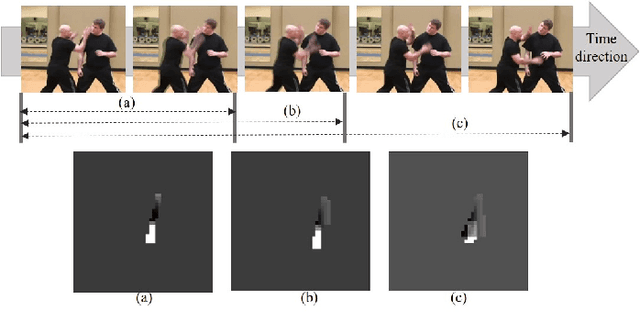
For human pose estimation in videos, it is significant how to use temporal information between frames. In this paper, we propose temporal flow maps for limbs (TML) and a multi-stride method to estimate and track human poses. The proposed temporal flow maps are unit vectors describing the limbs' movements. We constructed a network to learn both spatial information and temporal information end-to-end. Spatial information such as joint heatmaps and part affinity fields is regressed in the spatial network part, and the TML is regressed in the temporal network part. We also propose a data augmentation method to learn various types of TML better. The proposed multi-stride method expands the data by randomly selecting two frames within a defined range. We demonstrate that the proposed method efficiently estimates and tracks human poses on the PoseTrack 2017 and 2018 datasets.
3D Human Pose Estimation with Relational Networks
Jul 20, 2018



In this paper, we propose a novel 3D human pose estimation algorithm from a single image based on neural networks. We adopted the structure of the relational networks in order to capture the relations among different body parts. In our method, each pair of different body parts generates features, and the average of the features from all the pairs are used for 3D pose estimation. In addition, we propose a dropout method that can be used in relational modules, which inherently imposes robustness to the occlusions. The proposed network achieves state-of-the-art performance for 3D pose estimation in Human 3.6M dataset, and it effectively produces plausible results even in the existence of missing joints.
3D Human Pose Estimation Using Convolutional Neural Networks with 2D Pose Information
Sep 08, 2016



While there has been a success in 2D human pose estimation with convolutional neural networks (CNNs), 3D human pose estimation has not been thoroughly studied. In this paper, we tackle the 3D human pose estimation task with end-to-end learning using CNNs. Relative 3D positions between one joint and the other joints are learned via CNNs. The proposed method improves the performance of CNN with two novel ideas. First, we added 2D pose information to estimate a 3D pose from an image by concatenating 2D pose estimation result with the features from an image. Second, we have found that more accurate 3D poses are obtained by combining information on relative positions with respect to multiple joints, instead of just one root joint. Experimental results show that the proposed method achieves comparable performance to the state-of-the-art methods on Human 3.6m dataset.