 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantum Support Vector Machine-Based Classification of GPS Signal Reception Conditions
Aug 11, 2024



Global Positioning System (GPS) plays a critical role in navigation by utilizing satellite signals, but its accuracy in urban environments is often compromised by signal obstructions. Previous research has categorized GPS reception conditions into line-of-sight (LOS), non-line-of-sight (NLOS), and LOS+NLOS scenarios to enhance accuracy. This paper introduces a novel approach using quantum support vector machines (QSVM) with a ZZ feature map and fidelity quantum kernel to classify urban GPS signal reception conditions, comparing its performance against classical SVM methods. While classical SVM has been previously explored for this purpose, our study is the first to apply QSVM to this classification task. We conducted experiments using datasets from two distinct urban locations to train and evaluate SVM and QSVM models. Our results demonstrate that QSVM achieves superior classification accuracy compared to classical SVM for urban GPS signal datasets. Additionally, we emphasize the importance of appropriately scaling raw data when utilizing QSVM.
Ground Truth Generation Algorithm for Medium-Frequency R-Mode Skywave Detection
Sep 04, 2023


With the advancement of transportation vehicles, the importance and utility of navigation systems providing positioning, navigation, and timing (PNT) information have been increasing. Global navigation satellite systems (GNSS) are widely used navigation systems, but they are vulnerable to radio frequency interference (RFI), resulting in disruptions of satellite navigation signals. Recognizing this limitation, extensive research is being conducted on alternative navigation systems. In the maritime industry, ongoing research focuses on a groundbased integrated navigation system called R-Mode. R-Mode utilizes medium frequency (MF) differential GNSS (DGNSS) and very high-frequency data exchange system (VDES) signals as ranging signals for positioning and incorporates the existing ground-based navigation system known as enhanced long-range navigation (eLoran). However, MF R-Mode, which uses MF DGNSS signals for positioning, exhibits significant performance differences between daytime and nighttime due to skywave interference caused by signals reflecting off the ionosphere. In this study, we propose a skywave ground truth generation algorithm that is crucial for studying mitigation methods for MF R-Mode skywave interference. Furthermore, we demonstrate the proposed algorithm using field-test data.
Preliminary Analysis of Skywave Effects on MF DGNSS R-Mode Signals During Daytime and Nighttime
Sep 30, 2022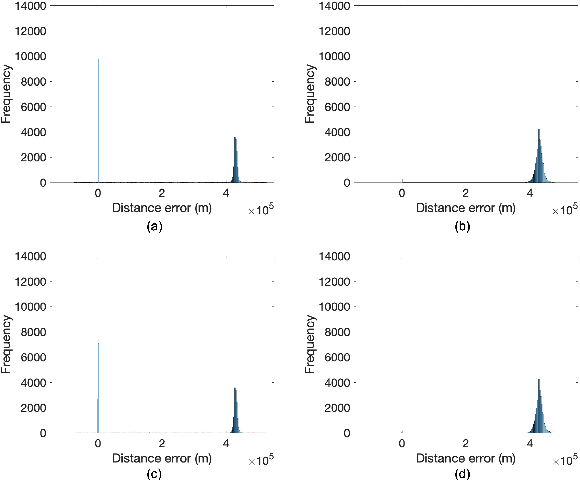
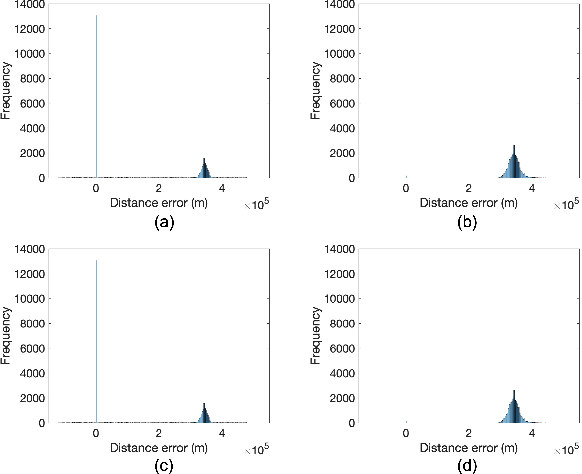
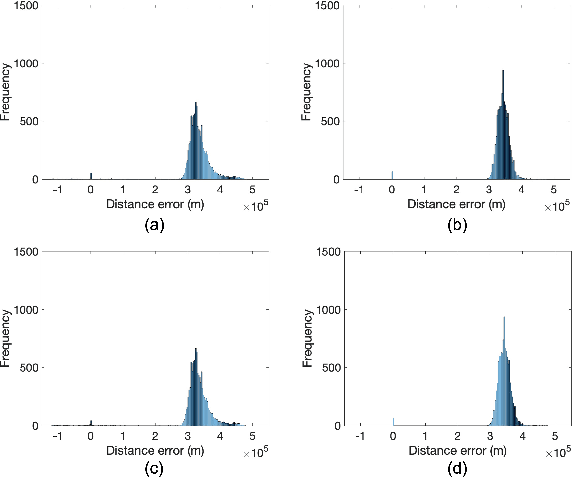
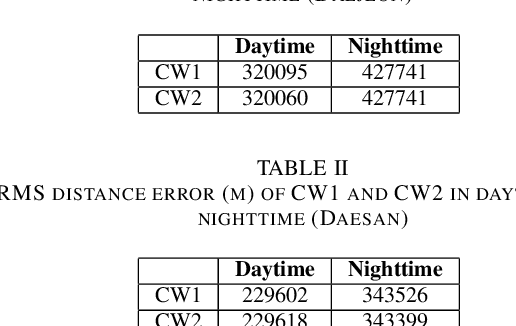
Accurate positioning, navigation, and timing (PNT) performance are prerequisites for several technologies today. In a marine environment, it is difficult to visually identify one's position accurately, leading to safety concerns. Currently, PNT information is provided mainly from Global Navigation Satellite Systems (GNSS); however, it is vulnerable to radio frequency interference, spoofing, and ionospheric anomaly. Therefore, research on a backup system is needed. Ranging Mode (R-Mode), a terrestrial integrated navigation system, is being investigated for use in a marine environment. R-Mode is a positioning technology that integrates terrestrial signals of opportunity such as medium frequency (MF) differential GNSS (DGNSS), very high frequency (VHF) automatic identification system (AIS), and enhanced long-range navigation (eLoran) signals. Previous studies in Europe show that signals in the MF band differ greatly in accuracy between daytime and nighttime. This difference is primarily caused by skywave. In this study, the MF DGNSS R-Mode signal transmitted from Chungju, Korea was received in Daesan and Daejeon, Korea. The skywave effect during daytime and nighttime was compared and investigated. In addition, the continuous wave intensity of the R-Mode signal was increased during the nighttime to compare its effect on the measurement accuracy.
Evaluation of RF Fingerprinting-Aided RSS-Based Target Localization for Emergency Response
Jun 19, 2022
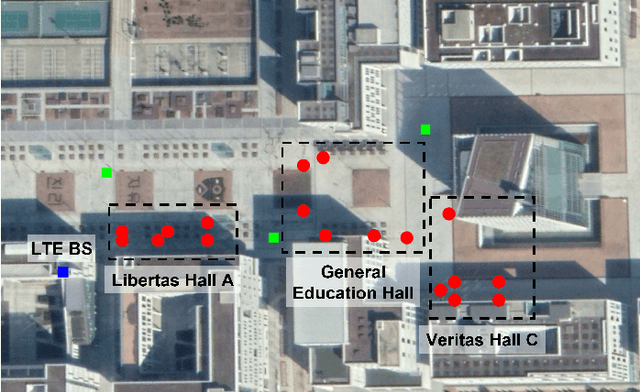
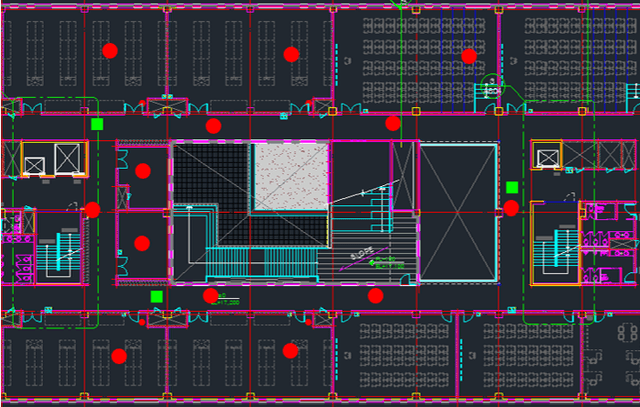
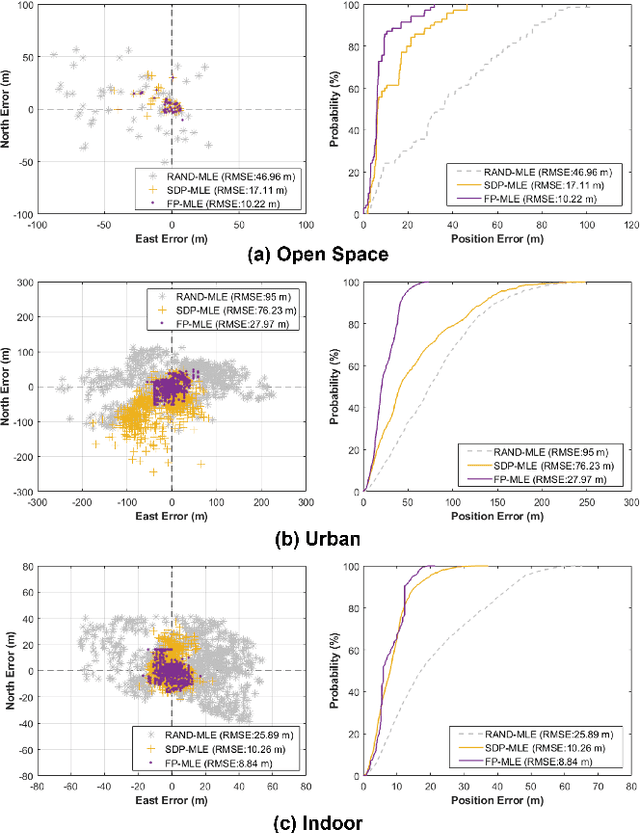
Target localization is essential for emergency dispatching situations. Maximum likelihood estimation (MLE) methods are widely used to estimate the target position based on the received signal strength measurements. However, the performance of MLE solvers is significantly affected by the initialization (i.e., initial guess of the solution or solution search space). To address this, a previous study proposed the semidefinite programming (SDP)-based MLE initialization. However, the performance of the SDP-based initialization technique is largely affected by the shadowing variance and geometric diversity between the target and receivers. In this study, a radio frequency (RF) fingerprinting-based MLE initialization is proposed. Further, a maximum likelihood problem for target localization combining RF fingerprinting is formulated. In the three test environments of open space, urban, and indoor, the proposed RF fingerprinting-aided target localization method showed a performance improvement of up to 63.31% and an average of 39.13%, compared to the MLE algorithm initialized with SDP. Furthermore, unlike the SDP-MLE method, the proposed method was not significantly affected by the poor geometry between the target and receivers in our experiments.
Development of an R-Mode Simulator Using MF DGNSS Signals
Aug 30, 2021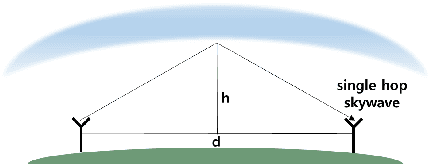
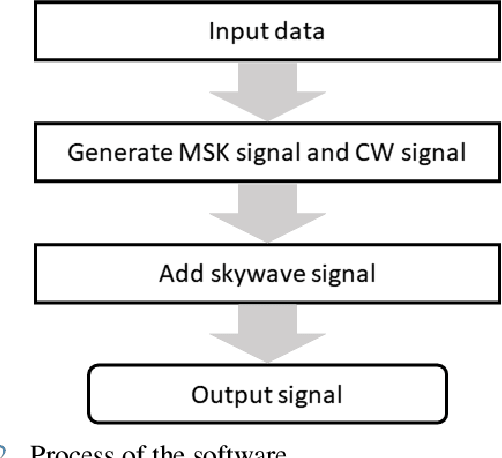
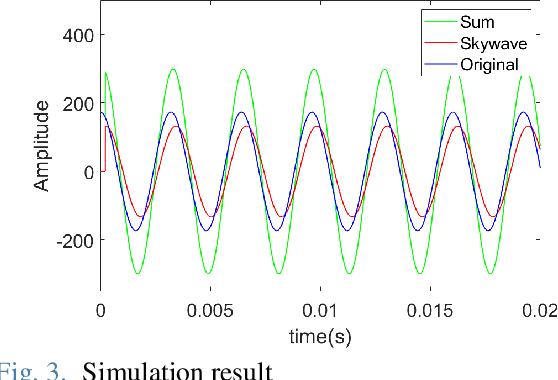
With the development of positioning, navigation, and timing (PNT) information-based industries, PNT information is becoming increasingly important. Therefore, various navigation studies have been actively conducted to back up global positioning system (GPS) in scenarios in which it is disabled. Ranging using signals of opportunity (SoOP) has the advantage of infrastructure already being in place. Among them, the ranging mode (R-Mode) is a technology that uses available SoOPs such as a medium frequency (MF) differential global navigation satellite System (DGNSS) signal that has recently been recognized for its potential for navigation and is currently under research. In this study, we developed a signal simulator that considers the characteristics of MF DGNSS signals and skywaves used in R-Mode.