 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance Comparison of Numerical Optimization Algorithms for RSS-TOA-Based Target Localization
Apr 24, 2023The maximum likelihood (ML) estimator can be applied to localize a target mobile device using the RSS and TOA. However, the ML estimator for the RSS-TOA-based target localization problem is nonconvex and nonlinear, having no analytical solution. Therefore, the ML estimator should be solved numerically, unless it is relaxed into a convex or linear form. This study investigates the target localization performance and computational complexity of numerical methods for solving an ML estimator. The three widely used numerical methods are: grid search, gradient descent, and particle swarm optimization. In the experimental evaluation, the grid search yielded the lowest target localization root-mean-squared error; however, the 95th percentile error of the grid search was larger than those of the other two algorithms. The average code computation time of the grid search was extremely large compared with those of the other two algorithms, and gradient descent exhibited the lowest computation time.
Performance Evaluation and Hybrid Application of the Greedy and Predictive UAV Trajectory Optimization Methods for Localizing a Target Mobile Device
Feb 23, 2023



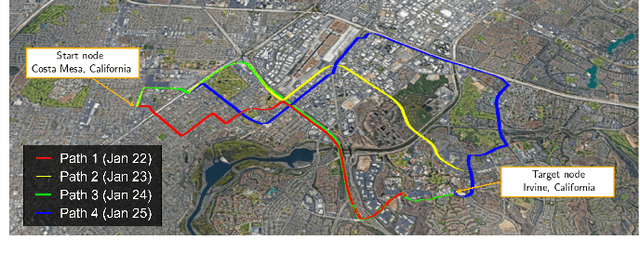
This study investigates unmanned aerial vehicle (UAV) trajectory planning strategies for localizing a target mobile device in emergency situations. The global navigation satellite system (GNSS)-based accurate position information of a target mobile device in an emergency may not be always available to first responders. For example, 1) GNSS positioning accuracy may be degraded in harsh signal environments and 2) in countries where emergency positioning service is not mandatory, some mobile devices may not report their locations. Under the cases mentioned above, one way to find the target mobile device is to use UAVs. Dispatched UAVs may search the target directly on the emergency site by measuring the strength of the signal (e.g., LTE wireless communication signal) from the target mobile device. To accurately localize the target mobile device in the shortest time possible, UAVs should fly in the most efficient way possible. The two popular trajectory optimization strategies of UAVs are greedy and predictive approaches. However, the research on localization performances of the two approaches has been evaluated only under favorable settings (i.e., under good UAV geometries and small received signal strength (RSS) errors); more realistic scenarios still remain unexplored. In this study, we compare the localization performance of the greedy and predictive approaches under realistic RSS errors (i.e., up to 6 dB according to the ITU-R channel model).
* Submitted to ION ITM 2023
Evaluation of RF Fingerprinting-Aided RSS-Based Target Localization for Emergency Response
Jun 19, 2022
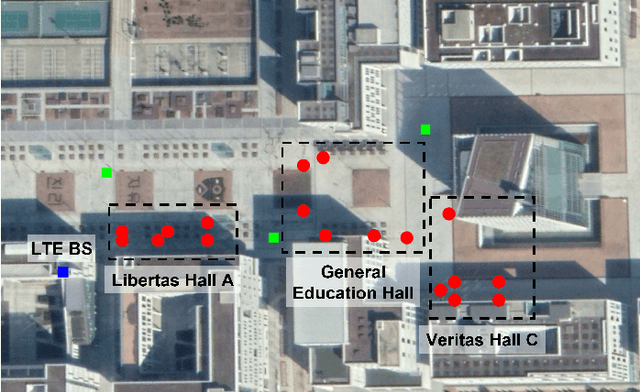
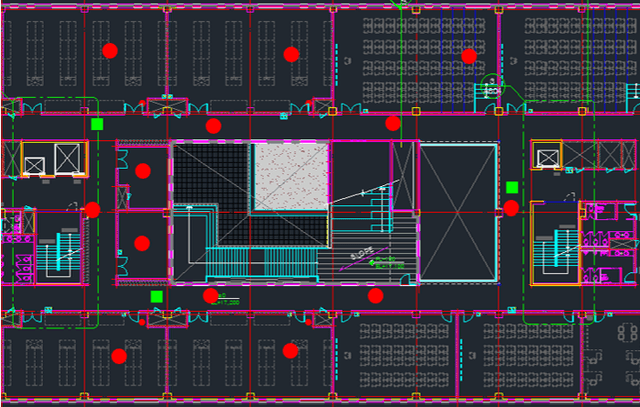
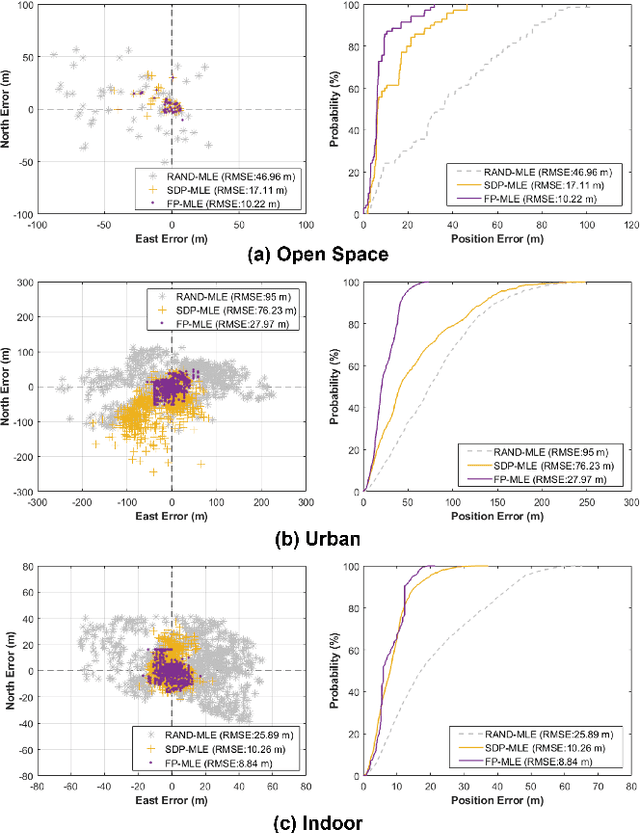
Target localization is essential for emergency dispatching situations. Maximum likelihood estimation (MLE) methods are widely used to estimate the target position based on the received signal strength measurements. However, the performance of MLE solvers is significantly affected by the initialization (i.e., initial guess of the solution or solution search space). To address this, a previous study proposed the semidefinite programming (SDP)-based MLE initialization. However, the performance of the SDP-based initialization technique is largely affected by the shadowing variance and geometric diversity between the target and receivers. In this study, a radio frequency (RF) fingerprinting-based MLE initialization is proposed. Further, a maximum likelihood problem for target localization combining RF fingerprinting is formulated. In the three test environments of open space, urban, and indoor, the proposed RF fingerprinting-aided target localization method showed a performance improvement of up to 63.31% and an average of 39.13%, compared to the MLE algorithm initialized with SDP. Furthermore, unlike the SDP-MLE method, the proposed method was not significantly affected by the poor geometry between the target and receivers in our experiments.
Urban Road Safety Prediction: A Satellite Navigation Perspective
Jun 08, 2022


Predicting the safety of urban roads for navigation via global navigation satellite systems (GNSS) signals is considered. To ensure safe driving of automated vehicles, the vehicle must plan its trajectory to avoid navigating on unsafe roads (e.g., icy conditions, construction zones, narrow streets, etc.). Such information can be derived from the roads' physical properties, vehicle's capabilities, and weather conditions. From a GNSS-based navigation perspective, the reliability of GNSS signals in different locales, which is heavily dependent on the road layout within the surrounding environment, is crucial to ensure safe automated driving. An urban road environment surrounded by tall objects can significantly degrade the accuracy and availability of GNSS signals. This article proposes an approach to predict the reliability of GNSS-based navigation to ensure safe urban navigation. Satellite navigation reliability at a given location and time on a road is determined based on the probabilistic position error bound of the vehicle-mounted GNSS receiver. A metric for GNSS reliability for ground vehicles is suggested, and a method to predict the conservative probabilistic error bound of the GNSS navigation solution is proposed. A satellite navigation reliability map is generated for various navigation applications. As a case study, the reliability map is used in the proposed optimization problem formulation for automated ground vehicle safety-constrained path planning.
Optimal Parameter Inflation to Enhance the Availability of Single-Frequency GBAS for Intelligent Air Transportation
Nov 03, 2021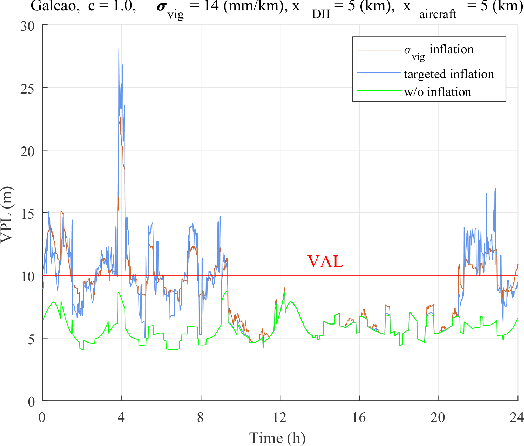
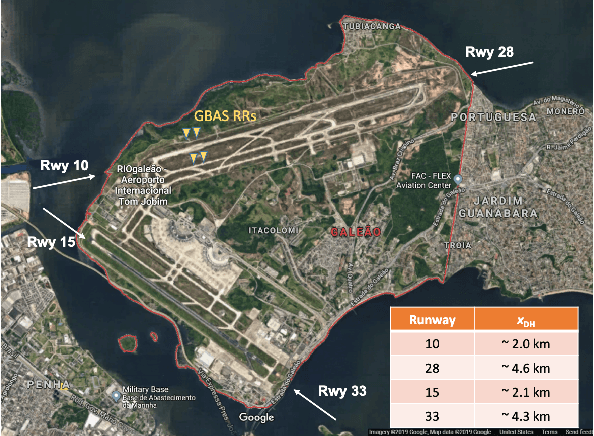
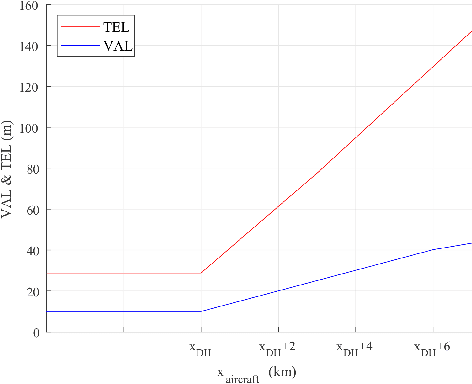

Ground-based Augmentation System (GBAS) augments Global Navigation Satellite Systems (GNSS) to support the precision approach and landing of aircraft. To guarantee integrity, existing single-frequency GBAS utilizes position-domain geometry screening to eliminate potentially unsafe satellite geometries by inflating one or more broadcast GBAS parameters. However, GBAS availability can be drastically impacted in low-latitude regions where severe ionospheric conditions have been observed. Thus, we developed a novel geometry-screening algorithm in this study to improve GBAS availability in low-latitude regions. Simulations demonstrate that the proposed method can provide 5-8 percentage point availability enhancement of GBAS at Gale\~ao airport near Rio de Janeiro, Brazil, compared to existing methods.
GPS Multipath Detection Based on Carrier-to-Noise-Density Ratio Measurements from a Dual-Polarized Antenna
Aug 21, 2021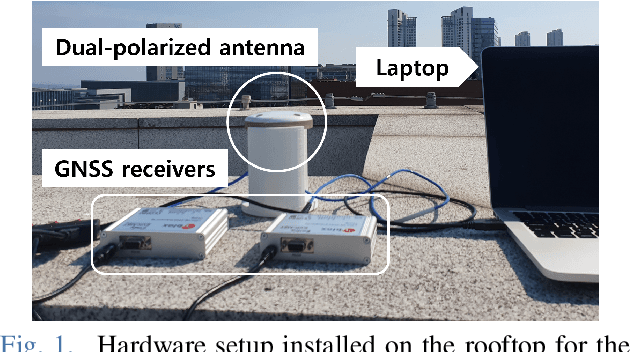

In this study, the global positioning system (GPS) multipath detection was performed based on the carrier-to-noise-density ratio, C/N0, measured through a dual-polarized antenna. As the right hand circular polarization (RHCP) antenna is sensitive to the signals directly received from the GPS, and the left hand circular polarization (LHCP) antenna is sensitive to the singly reflected signals, the C/N0 difference between the RHCP and LHCP measurements is used for multipath detection. Once we collected the GPS signals in a low multipath location, we calculated the C/N0 difference to obtain a threshold value that can be used to detect the multipath GPS signal received from another location. The results were validated through a ray-tracing simulation.