 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLifelong Scalable Multi-Agent Realistic Testbed and A Comprehensive Study on Design Choices in Lifelong AGV Fleet Management Systems
Feb 17, 2026We present Lifelong Scalable Multi-Agent Realistic Testbed (LSMART), an open-source simulator to evaluate any Multi-Agent Path Finding (MAPF) algorithm in a Fleet Management System (FMS) with Automated Guided Vehicles (AGVs). MAPF aims to move a group of agents from their corresponding starting locations to their goals. Lifelong MAPF (LMAPF) is a variant of MAPF that continuously assigns new goals for agents to reach. LMAPF applications, such as autonomous warehouses, often require a centralized, lifelong system to coordinate the movement of a fleet of robots, typically AGVs. However, existing works on MAPF and LMAPF often assume simplified kinodynamic models, such as pebble motion, as well as perfect execution and communication for AGVs. Prior work has presented SMART, a software capable of evaluating any MAPF algorithms while considering agent kinodynamics, communication delays, and execution uncertainties. However, SMART is designed for MAPF, not LMAPF. Generalizing SMART to an FMS requires many more design choices. First, an FMS parallelizes planning and execution, raising the question of when to plan. Second, given planners with varying optimality and differing agent-model assumptions, one must decide how to plan. Third, when the planner fails to return valid solutions, the system must determine how to recover. In this paper, we first present LSMART, an open-source simulator that incorporates all these considerations to evaluate any MAPF algorithms in an FMS. We then provide experiment results based on state-of-the-art methods for each design choice, offering guidance on how to effectively design centralized lifelong AGV Fleet Management Systems. LSMART is available at https://smart-mapf.github.io/lifelong-smart.
Analyzing Planner Design Trade-offs for MAPF under Realistic Simulation
Dec 10, 2025Multi-Agent Path Finding (MAPF) algorithms are increasingly deployed in industrial warehouses and automated manufacturing facilities, where robots must operate reliably under real-world physical constraints. However, existing MAPF evaluation frameworks typically rely on simplified robot models, leaving a substantial gap between algorithmic benchmarks and practical performance. Recent frameworks such as SMART, incorporate kinodynamic modeling and offer the MAPF community a platform for large-scale, realistic evaluation. Building on this capability, this work investigates how key planner design choices influence performance under realistic execution settings. We systematically study three fundamental factors: (1) the relationship between solution optimality and execution performance, (2) the sensitivity of system performance to inaccuracies in kinodynamic modeling, and (3) the interaction between model accuracy and plan optimality. Empirically, we examine these factors to understand how these design choices affect performance in realistic scenarios. We highlight open challenges and research directions to steer the community toward practical, real-world deployment.
Probabilistic 3D Multi-Object Cooperative Tracking for Autonomous Driving via Differentiable Multi-Sensor Kalman Filter
Sep 26, 2023Current state-of-the-art autonomous driving vehicles mainly rely on each individual sensor system to perform perception tasks. Such a framework's reliability could be limited by occlusion or sensor failure. To address this issue, more recent research proposes using vehicle-to-vehicle (V2V) communication to share perception information with others. However, most relevant works focus only on cooperative detection and leave cooperative tracking an underexplored research field. A few recent datasets, such as V2V4Real, provide 3D multi-object cooperative tracking benchmarks. However, their proposed methods mainly use cooperative detection results as input to a standard single-sensor Kalman Filter-based tracking algorithm. In their approach, the measurement uncertainty of different sensors from different connected autonomous vehicles (CAVs) may not be properly estimated to utilize the theoretical optimality property of Kalman Filter-based tracking algorithms. In this paper, we propose a novel 3D multi-object cooperative tracking algorithm for autonomous driving via a differentiable multi-sensor Kalman Filter. Our algorithm learns to estimate measurement uncertainty for each detection that can better utilize the theoretical property of Kalman Filter-based tracking methods. The experiment results show that our algorithm improves the tracking accuracy by 17% with only 0.037x communication costs compared with the state-of-the-art method in V2V4Real.
Collision Avoidance Detour for Multi-Agent Trajectory Forecasting
Jun 20, 2023We present our approach, Collision Avoidance Detour (CAD), which won the 3rd place award in the 2023 Waymo Open Dataset Challenge - Sim Agents, held at the 2023 CVPR Workshop on Autonomous Driving. To satisfy the motion prediction factorization requirement, we partition all the valid objects into three mutually exclusive sets: Autonomous Driving Vehicle (ADV), World-tracks-to-predict, and World-others. We use different motion models to forecast their future trajectories independently. Furthermore, we also apply collision avoidance detour resampling, additive Gaussian noise, and velocity-based heading estimation to improve the realism of our simulation result.
Selective Communication for Cooperative Perception in End-to-End Autonomous Driving
May 26, 2023The reliability of current autonomous driving systems is often jeopardized in situations when the vehicle's field-of-view is limited by nearby occluding objects. To mitigate this problem, vehicle-to-vehicle communication to share sensor information among multiple autonomous driving vehicles has been proposed. However, to enable timely processing and use of shared sensor data, it is necessary to constrain communication bandwidth, and prior work has done so by restricting the number of other cooperative vehicles and randomly selecting the subset of vehicles to exchange information with from all those that are within communication range. Although simple and cost effective from a communication perspective, this selection approach suffers from its susceptibility to missing those vehicles that possess the perception information most critical to navigation planning. Inspired by recent multi-agent path finding research, we propose a novel selective communication algorithm for cooperative perception to address this shortcoming. Implemented with a lightweight perception network and a previously developed control network, our algorithm is shown to produce higher success rates than a random selection approach on previously studied safety-critical driving scenario simulations, with minimal additional communication overhead.
Connection-Based Scheduling for Real-Time Intersection Control
Oct 16, 2022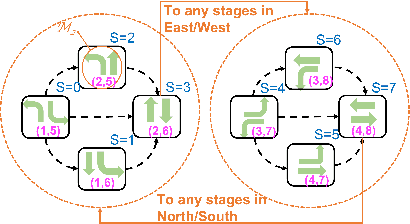

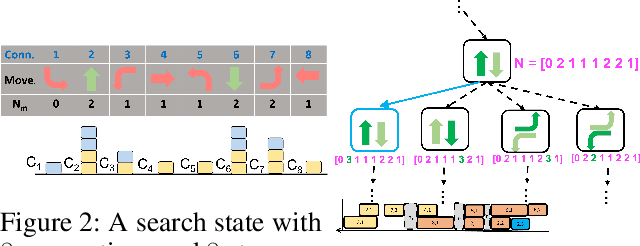
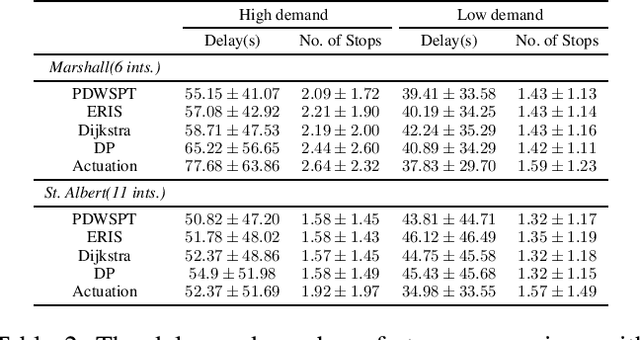
We introduce a heuristic scheduling algorithm for real-time adaptive traffic signal control to reduce traffic congestion. This algorithm adopts a lane-based model that estimates the arrival time of all vehicles approaching an intersection through different lanes, and then computes a schedule (i.e., a signal timing plan) that minimizes the cumulative delay incurred by all approaching vehicles. State space, pruning checks and an admissible heuristic for A* search are described and shown to be capable of generating an intersection schedule in real-time (i.e., every second). Due to the effectiveness of the heuristics, the proposed approach outperforms a less expressive Dynamic Programming approach and previous A*-based approaches in run-time performance, both in simulated test environments and actual field tests.
Cooperative Schedule-Driven Intersection Control with Connected and Autonomous Vehicles
Jul 03, 2019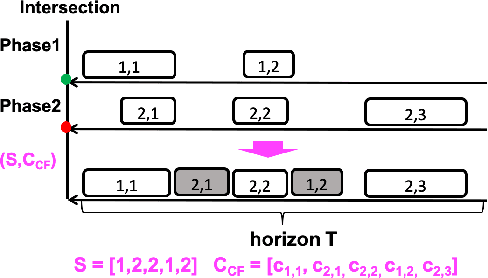



Recent work in decentralized, schedule-driven traffic control has demonstrated the ability to improve the efficiency of traffic flow in complex urban road networks. In this approach, a scheduling agent is associated with each intersection. Each agent senses the traffic approaching its intersection and in real-time constructs a schedule that minimizes the cumulative wait time of vehicles approaching the intersection over the current look-ahead horizon. In this paper, we propose a cooperative algorithm that utilizes both connected and autonomous vehicles (CAV) and schedule-driven traffic control to create better traffic flow in the city. The algorithm enables an intersection scheduling agent to adjust the arrival time of an approaching platoon through use of wireless communication to control the velocity of vehicles. The sequence of approaching platoons is thus shifted toward a new shape that has smaller cumulative delay. We demonstrate how this algorithm outperforms the original approach in a real-time traffic signal control problem.
Using Bi-Directional Information Exchange to Improve Decentralized Schedule-Driven Traffic Control
Jul 03, 2019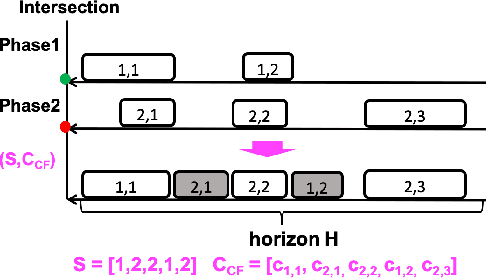

Recent work in decentralized, schedule-driven traffic control has demonstrated the ability to improve the efficiency of traffic flow in complex urban road networks. In this approach, a scheduling agent is associated with each intersection. Each agent senses the traffic approaching its intersection and in real-time constructs a schedule that minimizes the cumulative wait time of vehicles approaching the intersection over the current look-ahead horizon. In order to achieve network level coordination in a scalable manner, scheduling agents communicate only with their direct neighbors. Each time an agent generates a new intersection schedule it communicates its expected outflows to its downstream neighbors as a prediction of future demand and these outflows are appended to the downstream agent's locally perceived demand. In this paper, we extend this basic coordination algorithm to additionally incorporate the complementary flow of information reflective of an intersection's current congestion level to its upstream neighbors. We present an asynchronous decentralized algorithm for updating intersection schedules and congestion level estimates based on these bi-directional information flows. By relating this algorithm to the self-optimized decision making of the basic operation, we are able to approach network-wide optimality and reduce inefficiency due to strictly self-interested intersection control decisions.
Coping with Large Traffic Volumes in Schedule-Driven Traffic Signal Control
Mar 06, 2019



Recent work in decentralized, schedule-driven traffic control has demonstrated the ability to significantly improve traffic flow efficiency in complex urban road networks. However, in situations where vehicle volumes increase to the point that the physical capacity of a road network reaches or exceeds saturation, it has been observed that the effectiveness of a schedule-driven approach begins to degrade, leading to progressively higher network congestion. In essence, the traffic control problem becomes less of a scheduling problem and more of a queue management problem in this circumstance. In this paper we propose a composite approach to real-time traffic control that uses sensed information on queue lengths to influence scheduling decisions and gracefully shift the signal control strategy to queue management in high volume/high congestion settings. Specifically, queue-length information is used to establish weights for the sensed vehicle clusters that must be scheduled through a given intersection at any point, and hence bias the wait time minimization calculation. To compute these weights, we develop a model in which successive movement phases are viewed as different states of an Ising model, and parameters quantify strength of interactions. To ensure scalability, queue information is only exchanged between direct neighbors and the asynchronous nature of local intersection scheduling is preserved. We demonstrate the potential of the approach through microscopic traffic simulation of a real-world road network, showing a 60% reduction in average wait times over the baseline schedule-driven approach in heavy traffic scenarios. We also report initial field test results, which show the ability to reduce queues during heavy traffic periods.
Design of a GIS-based Assistant Software Agent for the Incident Commander to Coordinate Emergency Response Operations
Jan 01, 2014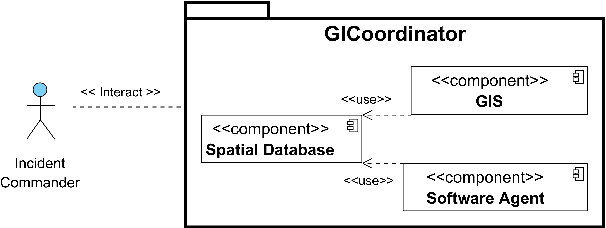
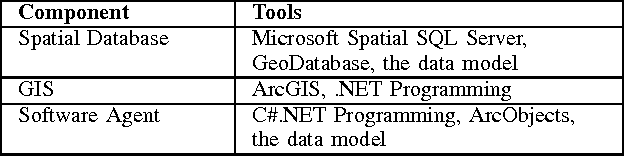
Problem: This paper addresses the design of an intelligent software system for the IC (incident commander) of a team in order to coordinate actions of agents (field units or robots) in the domain of emergency/crisis response operations. Objective: This paper proposes GICoordinator. It is a GIS-based assistant software agent that assists and collaborates with the human planner in strategic planning and macro tasks assignment for centralized multi-agent coordination. Method: Our approach to design GICoordinator was to: analyze the problem, design a complete data model, design an architecture of GICoordinator, specify required capabilities of human and system in coordination problem solving, specify development tools, and deploy. Result: The result was an architecture/design of GICoordinator that contains system requirements. Findings: GICoordinator efficiently integrates geoinformatics with artifice intelligent techniques in order to provide a spatial intelligent coordinator system for an IC to efficiently coordinate and control agents by making macro/strategic decisions. Results define a framework for future works to develop this system.