 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConnection-Based Scheduling for Real-Time Intersection Control
Oct 16, 2022

We introduce a heuristic scheduling algorithm for real-time adaptive traffic signal control to reduce traffic congestion. This algorithm adopts a lane-based model that estimates the arrival time of all vehicles approaching an intersection through different lanes, and then computes a schedule (i.e., a signal timing plan) that minimizes the cumulative delay incurred by all approaching vehicles. State space, pruning checks and an admissible heuristic for A* search are described and shown to be capable of generating an intersection schedule in real-time (i.e., every second). Due to the effectiveness of the heuristics, the proposed approach outperforms a less expressive Dynamic Programming approach and previous A*-based approaches in run-time performance, both in simulated test environments and actual field tests.
Cooperative Schedule-Driven Intersection Control with Connected and Autonomous Vehicles
Jul 03, 2019



Recent work in decentralized, schedule-driven traffic control has demonstrated the ability to improve the efficiency of traffic flow in complex urban road networks. In this approach, a scheduling agent is associated with each intersection. Each agent senses the traffic approaching its intersection and in real-time constructs a schedule that minimizes the cumulative wait time of vehicles approaching the intersection over the current look-ahead horizon. In this paper, we propose a cooperative algorithm that utilizes both connected and autonomous vehicles (CAV) and schedule-driven traffic control to create better traffic flow in the city. The algorithm enables an intersection scheduling agent to adjust the arrival time of an approaching platoon through use of wireless communication to control the velocity of vehicles. The sequence of approaching platoons is thus shifted toward a new shape that has smaller cumulative delay. We demonstrate how this algorithm outperforms the original approach in a real-time traffic signal control problem.
Using Bi-Directional Information Exchange to Improve Decentralized Schedule-Driven Traffic Control
Jul 03, 2019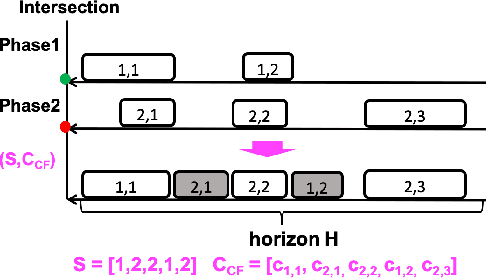

Recent work in decentralized, schedule-driven traffic control has demonstrated the ability to improve the efficiency of traffic flow in complex urban road networks. In this approach, a scheduling agent is associated with each intersection. Each agent senses the traffic approaching its intersection and in real-time constructs a schedule that minimizes the cumulative wait time of vehicles approaching the intersection over the current look-ahead horizon. In order to achieve network level coordination in a scalable manner, scheduling agents communicate only with their direct neighbors. Each time an agent generates a new intersection schedule it communicates its expected outflows to its downstream neighbors as a prediction of future demand and these outflows are appended to the downstream agent's locally perceived demand. In this paper, we extend this basic coordination algorithm to additionally incorporate the complementary flow of information reflective of an intersection's current congestion level to its upstream neighbors. We present an asynchronous decentralized algorithm for updating intersection schedules and congestion level estimates based on these bi-directional information flows. By relating this algorithm to the self-optimized decision making of the basic operation, we are able to approach network-wide optimality and reduce inefficiency due to strictly self-interested intersection control decisions.
Coping with Large Traffic Volumes in Schedule-Driven Traffic Signal Control
Mar 06, 2019



Recent work in decentralized, schedule-driven traffic control has demonstrated the ability to significantly improve traffic flow efficiency in complex urban road networks. However, in situations where vehicle volumes increase to the point that the physical capacity of a road network reaches or exceeds saturation, it has been observed that the effectiveness of a schedule-driven approach begins to degrade, leading to progressively higher network congestion. In essence, the traffic control problem becomes less of a scheduling problem and more of a queue management problem in this circumstance. In this paper we propose a composite approach to real-time traffic control that uses sensed information on queue lengths to influence scheduling decisions and gracefully shift the signal control strategy to queue management in high volume/high congestion settings. Specifically, queue-length information is used to establish weights for the sensed vehicle clusters that must be scheduled through a given intersection at any point, and hence bias the wait time minimization calculation. To compute these weights, we develop a model in which successive movement phases are viewed as different states of an Ising model, and parameters quantify strength of interactions. To ensure scalability, queue information is only exchanged between direct neighbors and the asynchronous nature of local intersection scheduling is preserved. We demonstrate the potential of the approach through microscopic traffic simulation of a real-world road network, showing a 60% reduction in average wait times over the baseline schedule-driven approach in heavy traffic scenarios. We also report initial field test results, which show the ability to reduce queues during heavy traffic periods.