 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Schedule-Driven Intersection Control with Connected and Autonomous Vehicles
Jul 03, 2019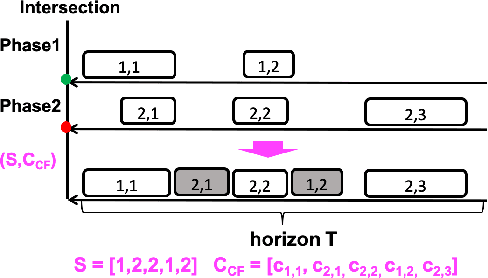



Recent work in decentralized, schedule-driven traffic control has demonstrated the ability to improve the efficiency of traffic flow in complex urban road networks. In this approach, a scheduling agent is associated with each intersection. Each agent senses the traffic approaching its intersection and in real-time constructs a schedule that minimizes the cumulative wait time of vehicles approaching the intersection over the current look-ahead horizon. In this paper, we propose a cooperative algorithm that utilizes both connected and autonomous vehicles (CAV) and schedule-driven traffic control to create better traffic flow in the city. The algorithm enables an intersection scheduling agent to adjust the arrival time of an approaching platoon through use of wireless communication to control the velocity of vehicles. The sequence of approaching platoons is thus shifted toward a new shape that has smaller cumulative delay. We demonstrate how this algorithm outperforms the original approach in a real-time traffic signal control problem.