 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Inverse Optimization to Learn Cost Functions in Generalized Nash Games
Feb 24, 2021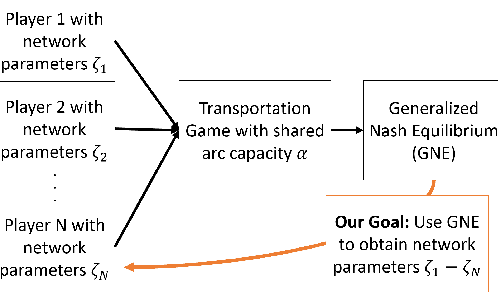
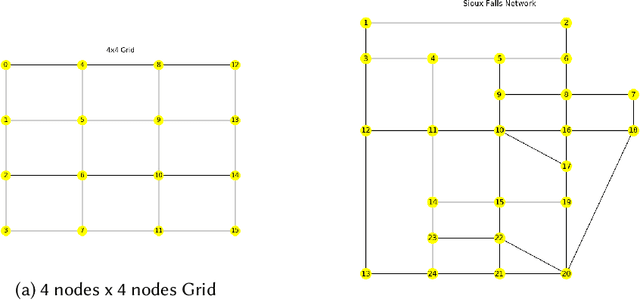
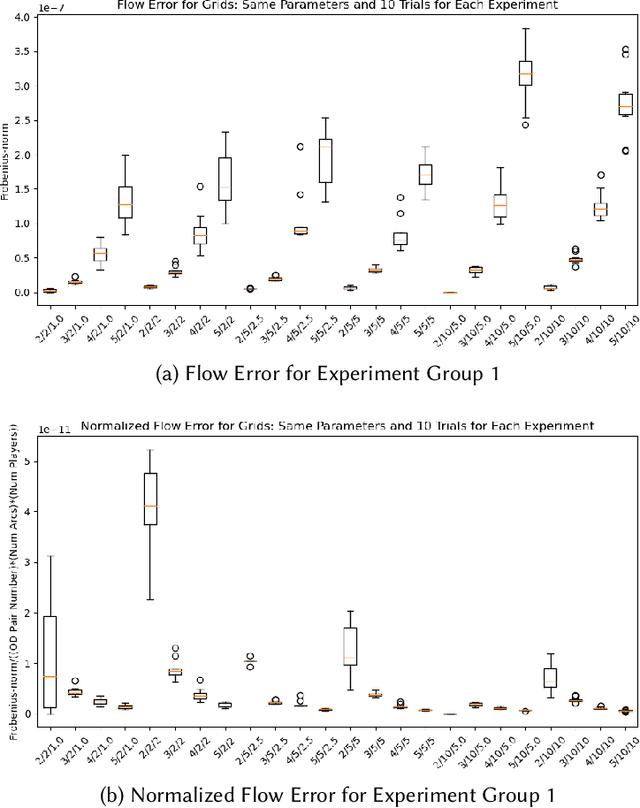
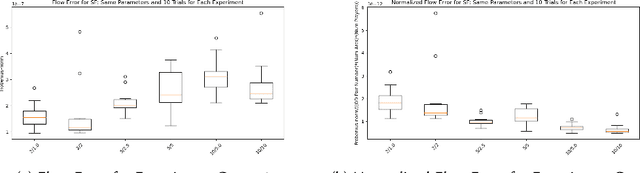
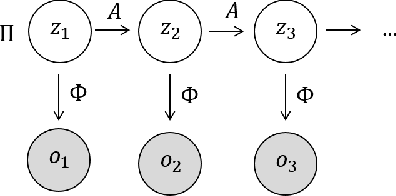
As demonstrated by Ratliff et al. (2014), inverse optimization can be used to recover the objective function parameters of players in multi-player Nash games. These games involve the optimization problems of multiple players in which the players can affect each other in their objective functions. In generalized Nash equilibrium problems (GNEPs), a player's set of feasible actions is also impacted by the actions taken by other players in the game; see Facchinei and Kanzow (2010) for more background on this problem. One example of such impact comes in the form of joint/"coupled" constraints as referenced by Rosen (1965), Harker (1991), and Facchinei et al. (2007) which involve other players' variables in the constraints of the feasible region. We extend the framework of Ratliff et al. (2014) to find inverse optimization solutions for the class of GNEPs with joint constraints. The resulting formulation is then applied to a simulated multi-player transportation problem on a road network. Also, we provide some theoretical results related to this transportation problem regarding runtime of the extended framework as well as uniqueness and non-uniqueness of solutions to our simulation experiments. We see that our model recovers parameterizations that produce the same flow patterns as the original parameterizations and that this holds true across multiple networks, different assumptions regarding players' perceived costs, and the majority of restrictive capacity settings and the associated numbers of players. Code for the project can be found at: https://github.com/sallen7/IO_GNEP.
Change-point Detection Methods for Body-Worn Video
Oct 20, 2016

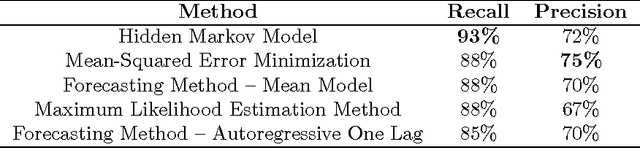
Body-worn video (BWV) cameras are increasingly utilized by police departments to provide a record of police-public interactions. However, large-scale BWV deployment produces terabytes of data per week, necessitating the development of effective computational methods to identify salient changes in video. In work carried out at the 2016 RIPS program at IPAM, UCLA, we present a novel two-stage framework for video change-point detection. First, we employ state-of-the-art machine learning methods including convolutional neural networks and support vector machines for scene classification. We then develop and compare change-point detection algorithms utilizing mean squared-error minimization, forecasting methods, hidden Markov models, and maximum likelihood estimation to identify noteworthy changes. We test our framework on detection of vehicle exits and entrances in a BWV data set provided by the Los Angeles Police Department and achieve over 90% recall and nearly 70% precision -- demonstrating robustness to rapid scene changes, extreme luminance differences, and frequent camera occlusions.