 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusion of Active and Passive Measurements for Robust and Scalable Positioning
Mar 24, 2024



This paper addresses the challenge of achieving reliable and robust positioning of a mobile agent, such as a radio device carried by a person, in scenarios where direct line-of-sight (LOS) links are obstructed or unavailable. The human body is considered as an extended object that scatters, attenuates and blocks the radio signals. We propose a novel particle-based sum-product algorithm (SPA) that fuses active measurements between the agent and anchors with passive measurements from pairs of anchors reflected off the body. We first formulate radio signal models for both active and passive measurements. Then, a joint tracking algorithm that utilizes both active and passive measurements is developed for the extended object. The algorithm exploits the probabilistic data association (PDA) for multiple object-related measurements. The results demonstrate superior accuracy during and after the obstructed line-of-sight (OLOS) situation, outperforming conventional methods that solely rely on active measurements. The proposed joint estimation approach significantly enhances the localization robustness via radio sensing.
Graph-based Simultaneous Localization and Bias Tracking
Oct 15, 2023



We present a factor graph formulation and particle-based sum-product algorithm for robust localization and tracking in multipath-prone environments. The proposed sequential algorithm jointly estimates the mobile agent's position together with a time-varying number of multipath components (MPCs). The MPCs are represented by "delay biases" corresponding to the offset between line-of-sight (LOS) component delay and the respective delays of all detectable MPCs. The delay biases of the MPCs capture the geometric features of the propagation environment with respect to the mobile agent. Therefore, they can provide position-related information contained in the MPCs without explicitly building a map of the environment. We demonstrate that the position-related information enables the algorithm to provide high-accuracy position estimates even in fully obstructed line-of-sight (OLOS) situations. Using simulated and real measurements in different scenarios we demonstrate the proposed algorithm to significantly outperform state-of-the-art multipath-aided tracking algorithms and show that the performance of our algorithm constantly attains the posterior Cramer-Rao lower bound (P-CRLB). Furthermore, we demonstrate the implicit capability of the proposed method to identify unreliable measurements and, thus, to mitigate lost tracks.
A Neural-enhanced Factor Graph-based Algorithm for Robust Positioning in Obstructed LOS Situations
Aug 30, 2023



This paper presents a neural-enhanced probabilistic model and corresponding factor graph-based sum-product algorithm for robust localization and tracking in multipath-prone environments. The introduced hybrid probabilistic model consists of physics-based and data-driven measurement models capturing the information contained in both, the line-of-sight (LOS) component as well as in multipath components (NLOS components). The physics-based and data-driven models are embedded in a joint Bayesian framework allowing to derive from first principles a factor graph-based algorithm that fuses the information of these models. The proposed algorithm uses radio signal measurements from multiple base stations to robustly estimate the mobile agent's position together with all model parameters. It provides high localization accuracy by exploiting the position-related information of the LOS component via the physics-based model and robustness by exploiting the geometric imprint of multipath components independent of the propagation channel via the data-driven model. In a challenging numerical experiment involving obstructed LOS situations to all anchors, we show that the proposed sequential algorithm significantly outperforms state-of-the-art methods and attains the posterior Cramer-Rao lower bound even with training data limited to local regions.
A Graph-based Algorithm for Robust Sequential Localization Exploiting Multipath for Obstructed-LOS-Bias Mitigation
Jul 24, 2022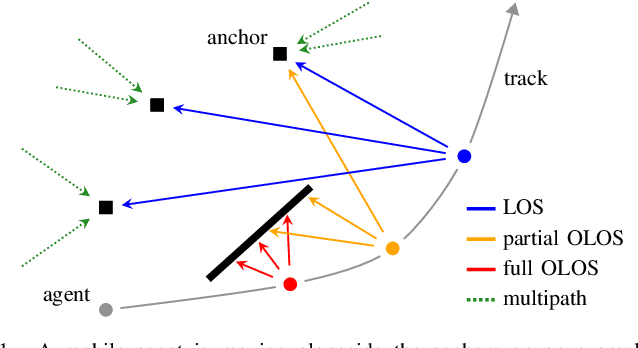

This paper presents a factor graph formulation and particle-based sum-product algorithm (SPA) for robust sequential localization in multipath-prone environments. The proposed algorithm jointly performs data association, sequential estimation of a mobile agent position, and adapts all relevant model parameters. We derive a novel non-uniform false alarm (FA) model that captures the delay and amplitude statistics of the multipath radio channel. This model enables the algorithm to indirectly exploit position-related information contained in the MPCs for the estimation of the agent position. Using simulated and real measurements, we demonstrate that the algorithm can provide high-accuracy position estimates even in fully obstructed line-of-sight (OLOS) situations, significantly outperforming the conventional amplitude-information probabilistic data association (AIPDA) filter. We show that the performance of our algorithm constantly attains the posterior Cramer-Rao lower bound (PCRLB), or even succeeds it, due to the additional information contained in the presented FA model.