 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance Evaluation of Deep Learning-Based State Estimation: A Comparative Study of KalmanNet
Nov 25, 2024



Kalman Filters (KF) are fundamental to real-time state estimation applications, including radar-based tracking systems used in modern driver assistance and safety technologies. In a linear dynamical system with Gaussian noise distributions the KF is the optimal estimator. However, real-world systems often deviate from these assumptions. This deviation combined with the success of deep learning across many disciplines has prompted the exploration of data driven approaches that leverage deep learning for filtering applications. These learned state estimators are often reported to outperform traditional model based systems. In this work, one prevalent model, KalmanNet, was selected and evaluated on automotive radar data to assess its performance under real-world conditions and compare it to an interacting multiple models (IMM) filter. The evaluation is based on raw and normalized errors as well as the state uncertainty. The results demonstrate that KalmanNet is outperformed by the IMM filter and indicate that while data-driven methods such as KalmanNet show promise, their current lack of reliability and robustness makes them unsuited for safety-critical applications.
UNIFY: Multi-Belief Bayesian Grid Framework based on Automotive Radar
Apr 24, 2021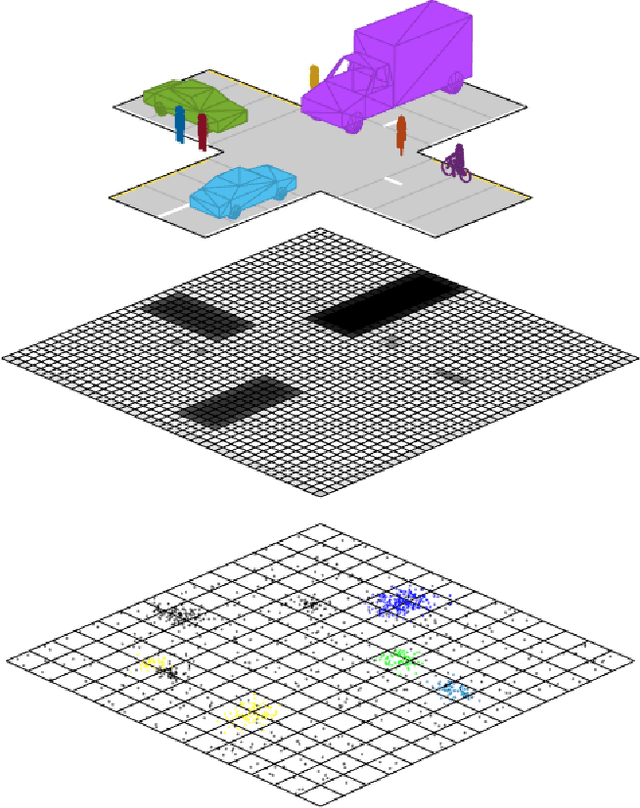
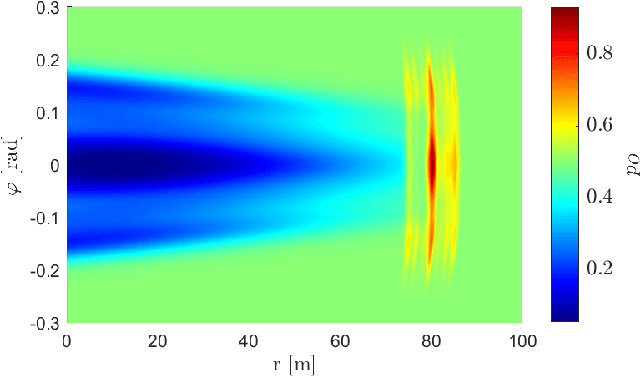
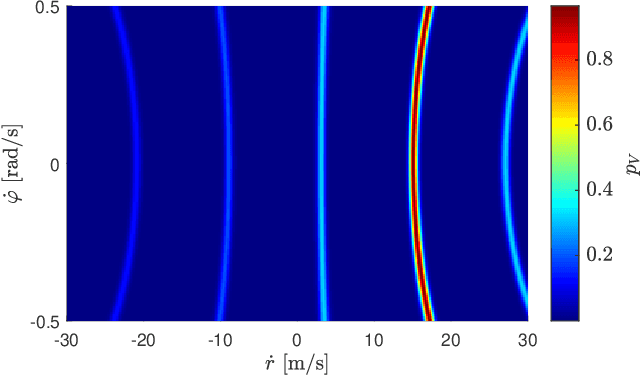
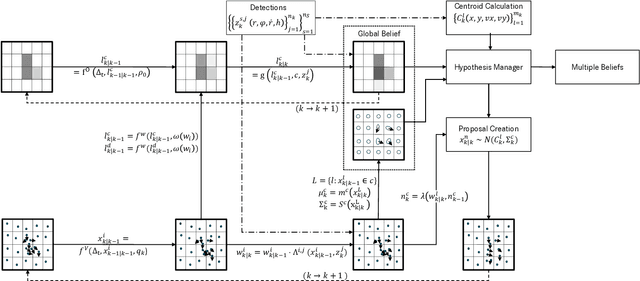
Grid maps are widely established for the representation of static objects in robotics and automotive applications. Though, incorporating velocity information is still widely examined because of the increased complexity of dynamic grids concerning both velocity measurement models for radar sensors and the representation of velocity in a grid framework. In this paper, both issues are addressed: sensor models and an efficient grid framework, which are required to ensure efficient and robust environment perception with radar. To that, we introduce new inverse radar sensor models covering radar sensor artifacts such as measurement ambiguities to integrate automotive radar sensors for improved velocity estimation. Furthermore, we introduce UNIFY, a multiple belief Bayesian grid map framework for static occupancy and velocity estimation with independent layers. The proposed UNIFY framework utilizes a grid-cell-based layer to provide occupancy information and a particle-based velocity layer for motion state estimation in an autonomous vehicle's environment. Each UNIFY layer allows individual execution as well as simultaneous execution of both layers for optimal adaption to varying environments in autonomous driving applications. UNIFY was tested and evaluated in terms of plausibility and efficiency on a large real-world radar data-set in challenging traffic scenarios covering different densities in urban and rural sceneries.
Automated Ground Truth Estimation For Automotive Radar Tracking Applications With Portable GNSS And IMU Devices
Jun 03, 2019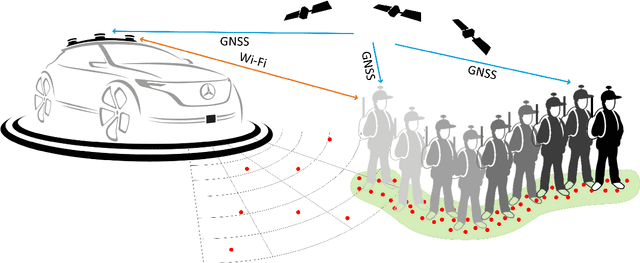
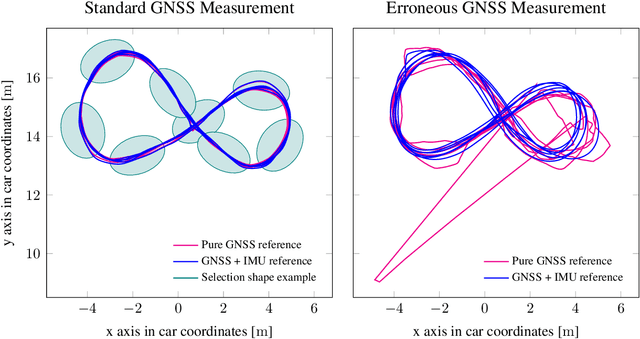

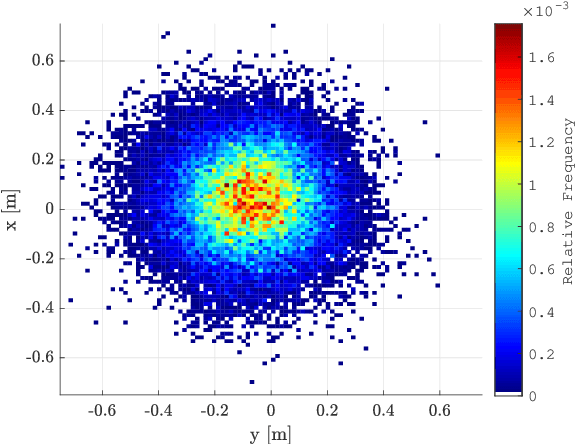
Baseline generation for tracking applications is a difficult task when working with real world radar data. Data sparsity usually only allows an indirect way of estimating the original tracks as most objects' centers are not represented in the data. This article proposes an automated way of acquiring reference trajectories by using a highly accurate hand-held global navigation satellite system (GNSS). An embedded inertial measurement unit (IMU) is used for estimating orientation and motion behavior. This article contains two major contributions. A method for associating radar data to vulnerable road user (VRU) tracks is described. It is evaluated how accurate the system performs under different GNSS reception conditions and how carrying a reference system alters radar measurements. Second, the system is used to track pedestrians and cyclists over many measurement cycles in order to generate object centered occupancy grid maps. The reference system allows to much more precisely generate real world radar data distributions of VRUs than compared to conventional methods. Hereby, an important step towards radar-based VRU tracking is accomplished.